小梅哥和你一起深入學習FPGA之串口調試(一)(上)

原始代碼驗證
本文引用地址:http://www.104case.com/article/283059.htm前面,通對設計代碼的一個簡單分析,弄清楚了特權同學設計代碼的基本架構和思路。那么看過特權同學教學視頻的都知道,該代碼能夠實現一個字節的數據收發測試。那么這里,小梅哥就先對該設計進行一個仿真,通過仿真來分析此設計的性能。
仿真的思路很簡單,就是通過模擬串口發送過程,給該設計模塊發送數據,由前面分析可知,該設計模塊接收到數據后,會立即將數據發送出去,因此我們還需要對串口發送出來的數據進行分析,這里,熟悉Uart協議的,我們可以直接觀察發送波形。當然,為了更加直觀,我們也可以設計一個模擬串口接收數據的仿真模型,通過該模塊來讀取串口發送出來的數據。考慮到看這篇文章的大多是初學者,為了讓大家能夠更好的查看我們的仿真結果,同時教大家進行仿真模型的設計,小梅哥還是自己編寫了一個虛擬的串口仿真模型。驗證時,只需要將該仿真模型掛接到串口模塊上,則該模型便能夠自動的給串口模塊發送數據,同時接收串口發送過來的數據。并會實時的將發送的數據和接收的數據打印出來,實際在觀察仿真結果時,我們便只需要觀看打印的結果就可以了。該串口仿真模型的代碼如下所示:
以下是代碼片段:
1 `timescale 1ns/1ps
2
3 module Uart_module ( uart_rx , uart_tx , send_state );
4
5 input uart_rx ;
6 output reg uart_tx ;
7 output reg send_state ;
8
9 reg Clk;
10 reg Rst_n ;
11
12 wire Mid_Flag_send ;
13 wire Mid_Flag_Receive ;
14
15 reg Receive_Baud_Start ;
16 reg [ 7 : 0] rx_data ;
17
18 initial Clk = 1;
19 always #10 Clk = ~Clk;
20
21 speed_select speed_select_Send (
22 . clk( Clk),
23 . rst_n ( Rst_n ),
24 . bps_start ( 1'b1 ),
25 . clk_bps ( Mid_Flag_send )
26 );
27
28 speed_select speed_select_receive (
29 . clk( Clk),
30 . rst_n ( Rst_n ),
31 . bps_start ( Receive_Baud_Start ),
32 . clk_bps ( Mid_Flag_Receive )
33 );
34
35 initial begin
36 Rst_n = 0;
37 uart_tx = 1;
38 send_state = 0;
39 #300 Rst_n = 1;
40
41 $display ( "Set Baud As 9600bps" );
42 #200 ; Uart_Send ( 8'hb6 );
43 #20 ; Uart_Send ( 8'he7 );
44 #80 ; Uart_Send ( 8'hf0 );
45 #500 ; Uart_Send ( 8'h02 );
46 #300 ; Uart_Send ( 8'hb4 );
47 #40 ; Uart_Send ( 8'he5 );
48 #90 ; Uart_Send ( 8'hb0 );
49 #1000 ; Uart_Send ( 8'h32 );
50 #2000000 ;
51 $stop ;
52 end
53
54 task Uart_Send ;
55 input [ 7: 0] Data ;
56 begin
57 send_state = 1;
58 @( posedge Mid_Flag_send) #0.1 uart_tx = 0;
59 @( posedge Mid_Flag_send) #0.1 uart_tx = Data [0];
60 @( posedge Mid_Flag_send) #0.1 uart_tx = Data [1];
61 @( posedge Mid_Flag_send) #0.1 uart_tx = Data [2];
62 @( posedge Mid_Flag_send) #0.1 uart_tx = Data [3];
63 @( posedge Mid_Flag_send) #0.1 uart_tx = Data [4];
64 @( posedge Mid_Flag_send) #0.1 uart_tx = Data [5];
65 @( posedge Mid_Flag_send) #0.1 uart_tx = Data [6];
66 @( posedge Mid_Flag_send) #0.1 uart_tx = Data [7];
67 @( posedge Mid_Flag_send) #0.1 uart_tx = 1;
68 $display ( "Uart_Send Data = %0h" , Data );
69 send_state = 0;
70 end
71 endtask
72
73 initial begin
74 forever begin
75 @( negedge uart_rx )
76 begin
77 Receive_Baud_Start = 1;
78 @( posedge Mid_Flag_Receive);
79 @( posedge Mid_Flag_Receive) rx_data [0] = uart_rx ;
80 @( posedge Mid_Flag_Receive) rx_data [1] = uart_rx ;
81 @( posedge Mid_Flag_Receive) rx_data [2] = uart_rx ;
82 @( posedge Mid_Flag_Receive) rx_data [3] = uart_rx ;
83 @( posedge Mid_Flag_Receive) rx_data [4] = uart_rx ;
84 @( posedge Mid_Flag_Receive) rx_data [5] = uart_rx ;
85 @( posedge Mid_Flag_Receive) rx_data [6] = uart_rx ;
86 @( posedge Mid_Flag_Receive) rx_data [7] = uart_rx ;
87 @( posedge Mid_Flag_Receive) Receive_Baud_Start = 0;
88 $display ( "Uart_receive Data = %0h" , rx_data );
89 end
90 end
91 end
92
93 endmodule
94
因為在將代碼復制到word的過程中,會有一定的格式兼容問題,所以文中部分格式不是太規范,望各位理解,另外,完整的代碼,小梅哥也以pdf的形式提供了,感興趣的朋友可以下載學習。
本仿真模型的第一句話“`timescale 1ns/1ps”為仿真精度及時間的說明,定義時間精度為1ps,時間單位為1ns,那么我們在代碼編寫的過程中,如果寫成“#200”則表示延時200ns,因為時間精度為1ps,因此我們還可以進一步提高延時精度,如“#200.1”表示延時200.1ns。一般的測試文件(testbench)中,這句話作為第一句話,必寫,當然,時間精度和單位我們可以根據自己的需求更改,如寫成“`timescale 1us/1ns”或者“`timescale 1ns/1ns”等都是可以的。
該模塊作為一個仿真模型,就是虛擬了一個串口收發儀器,既然是一個串口收發儀器,則必然有串口發送端口和串口接收端口,因此在模塊名后面定義了三個端口。這與一般的testbench不同,一般的testbench作為仿真時的頂層,不需要端口,因此模塊名后就直接以“;”結束。該模塊的三個端口“uart_rx , uart_tx , send_state”分別為串口接收端口、串口發送端口、串口發送狀態信號。串口收發端口不用說,大家也已經知道了,串口發送狀態信號主要作為指示信號,指示當前仿真模型正在進行數據的發送過程。
第9行至第16行為測試文件中信號的定義,以前我們總是理解說這些信號就是待測試模塊的端口,需要在測試文件中定義。那么這里小梅哥更喜歡換一種方式來理解:我們自己的設計,本設計中即特權的串口模塊,是一個功能未知的黑盒子,這個黑盒子有一些信號線引出,有的信號線是作為輸入的,即需要外部輸入一定的信號作為激勵,而有的信號線是作為輸出的,能夠輸出一些數據,當然還有一些信號線是既能夠作為輸入,又能夠作為輸出的,即三態。我們要想知道這個黑盒子的功能,就需要給這個黑盒子的輸入信號線接上信號源,通過給這些輸入信號線一定的激勵,觀察其輸出端口上的響應,從而獲知該黑盒子的功能。那么在這里,對于待測試模塊的輸入端口,我們就接上信號發生器,對于輸出端口,我們就接上示波器或者邏輯分析儀,這樣,我們就能夠通過信號發生器給輸入端口產生一定的激勵,然后通過示波器觀察輸出端口的輸出了。即如下圖所示:
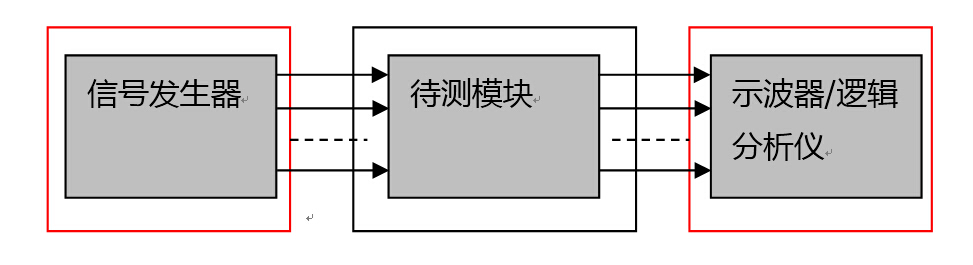
那么,我們的testbench主要實現信號發生器的功能,既然是信號發生器那么就一定有數據信號輸出,這個數據信號輸出就可以連接到我們的待測模塊上。待測試模塊的輸出端口,連接到我們的示波器或者邏輯分析儀的探頭上,這樣就實現了一個完整的測試系統,那么我們信號發生器的信號源,可能命名叫做,a,b,c,d,e……. 而我們示波器的探頭則命名為探頭1,探頭2……接下來就好理解了,在testbench,我們將信號發生器的輸出信號定義為reg型,而示波器的探頭定義為wire型。我們信號發生器的輸出信號線和示波器的探頭線都可以任意命名,實際使用時一一對應連接到待測試模塊的端口上,也可以就直接與待測模塊的各個端口名保持一致。本設計中,小梅哥讓testbench中的信號與待測模塊的端口保持一致。
第18行和19行為產生50MHz時鐘的語句。
因為本仿真模型實質上就是一個串口收發模塊,因此也需要有收發波特率發生器,這里小梅哥為了省事,直接調用了特權同學的波特率發生器模塊,來作為我仿真模型的波特率發生器。因為該波特率發生器本身也屬于待測試部分,小梅哥之所以敢放心的調用,是因為事先我已經通過仿真,確定了該波特率發生器功能的正確性。第21行至33行為分別例化得到發送波特率發生器和接收波特率發生器的代碼。
第54行至71行為發送一個完整字節的數據(自動添加起始位和停止位)的代碼,該部分寫成任務的形式,方便調用。當我們需要發送一個字節的數據時,例如,發送8'hb6,只需要寫“Uart_Send ( 8'hb6 )”即可,該任務便將自動執行,將數據發送出去。在一個字節的數據發送完成后,同時使用系統任務$display來打印當前發送的數據是多少,以方便我們直觀的觀察仿真運行過程。至于$display這個系統任務中各個部分的含義,請讀者自行閱讀verilog的語法書。代碼的42至49行便是調用此任務進行了多次數據的發送。
73行至91行為模擬串口接收部分,通過對串口模塊發送出來的數據進行接收,并將接收到的數據用$display函數打印出來。我們只需要閱讀發送數據和接收數據后打印出來的信息,即可判斷通信是否成功,待測模塊功能是否正常。
這里需要注意的是,打印出來的接收數據和發送數據是針對仿真模型來說的,send data是仿真模型發送出去的數據,對應待測模塊應該接收到的數據。receive data則是仿真模型接收到的數據,對應待測模塊發送的數據。
我們所編寫的測試文件,一定要是可控的,即在所有事務完成后,將仿真停下來,否則,仿真會一直進行下去,導致出現大量冗余波形,影響我們對仿真結果的分析。因此在第51行,當所有測試已經完成后,使用系統任務$stop將仿真停下來。
以上對小梅哥寫的串口仿真模型進行了介紹,在實際使用中,只需要將該模型與待測模塊按照如下圖所示的方式連接起來即可。

這里,小梅哥使用一個testbench文件作為頂層,將這兩個部分連接起來,同時產生my_uart_top工作所需的時鐘和復位信號。該文件詳細代碼如下:
1 `timescale 1ns /1ns
2
3 module Uart_tb ;
4
5 reg Clk;
6 reg Rst_n ;
7
8 wire uart_rx ;
9 wire uart_tx ;
10 wire send_state ;
11
12 my_uart_top u1 (
13 . clk( Clk),
14 . rst_n ( Rst_n ),
15 . rs232_rx ( uart_tx ),
16 . rs232_tx ( uart_rx )
17 );
18
19 Uart_module u2 (
20 . uart_rx ( uart_rx ),
21 . uart_tx ( uart_tx ),
22 . send_state ( send_state )
23 );
24
25 initial begin
26 Clk = 1;
27 Rst_n = 0;
28 #200 ;
29 Rst_n = 1;
30 end
31
32 always #10 Clk = ~Clk;
33
34 endmodule
35
該代碼實在簡單,只是實現了一個啟動時的初始化和50MHz時鐘的產生,因此小梅哥就不做任何分析了。













評論