【從零開始走進FPGA】 LCD1602 Hello World

前面說過,在C,C++等語言學習中,“Hello World”將會是第一個學習的代碼,但是在FPGA中由于電路驅動的復雜性,與單片機雷同,我們無法在電腦上實現“Hello World”的顯示,而必須依靠相關硬件。因此我們不得不在一定的基礎上,才能講解關于LCD1602字符液晶的驅動,以及Hello World的顯示。
本文引用地址:http://www.104case.com/article/273149.htm雷同于前面MCU按鍵消抖動移植代碼,此處也可以移植MCU LCD1602驅動代碼。本例程不是Bingo原創,是按照網友“小時不識月”的代碼,移植修改最后定型為Bingo版本(O(∩_∩)O哈哈~)。
電路圖此處不解釋,太簡單了。
一、驅動說明
由于FPGA的高速并行操作,并非順序執行,在代碼上與MCU有所不同。此處先講解驅動原理:
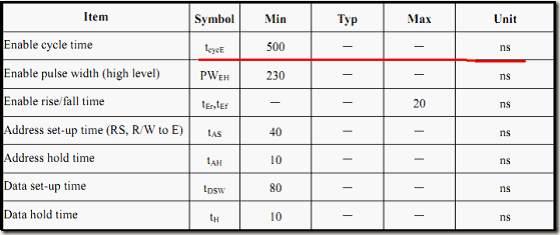
(1)分頻以得到500KHz固定的頻率,初始化LCD1602。如下圖所示,LCD_EN的頻率應該控制在2M以內(不同的LCD1602參數會有所不同)。
(2)通過三段式狀態機,來初始化以及給數據。
(3)通過循環讀取某一“數組”,循環給LCD1602數據,以接口形式方便改變。
二、FPGA LCD1602 FSM
1. 代碼
/*************************************************
* Module Name : lcd1602_driver
* Engineer : Crazy Bingo
* Target Device : EP2C8Q208C8
* Tool versions : Quartus II 11.0
* Create Date : 2011-7-3
* Revision : v1.0
* Description :
**************************************************/
module lcd1602_driver
(
input clk,
input rst_n,
output lcd_en, // lcd enable
output reg lcd_rs, // record,statement
output lcd_rw,
output reg [7:0] lcd_data
);
parameter [127:0] line_rom1 = "I am CrazyBingo!";
parameter [127:0] line_rom2 = "Hello World*^_^*";
//--------------------------------------
reg [15:0] cnt;
always @ (posedge clk or negedge rst_n)
begin
if(!rst_n)
cnt <= 0;
else
cnt <= cnt + 1'b1;
end
assign lcd_en = cnt[15]; //lcd enable,keep same time
assign lcd_rw = 1'b0; //write only
wire cmd_flag = (cnt == 16'h7FFF) ? 1'b1 : 1'b0; //when lcd_en is steady,write a cmd
//---------------------------------------
// Gray code : 40 states
parameter IDLE = 8'h00; // IDLE
// lcd init
parameter DISP_SET = 8'h01; // display mode
parameter DISP_OFF = 8'h03; // off display
parameter CLR_SCR = 8'h02; // clear the lcd
parameter CURSOR_SET1 = 8'h06; // cursor set
parameter CURSOR_SET2 = 8'h07; // on display, cursor set
// display 1th line
parameter ROW1_ADDR = 8'h05;
parameter ROW1_0 = 8'h04;
parameter ROW1_1 = 8'h0C;
parameter ROW1_2 = 8'h0D;
parameter ROW1_3 = 8'h0F;
parameter ROW1_4 = 8'h0E;
parameter ROW1_5 = 8'h0A;
parameter ROW1_6 = 8'h0B;
parameter ROW1_7 = 8'h09;
parameter ROW1_8 = 8'h08;
parameter ROW1_9 = 8'h18;
parameter ROW1_A = 8'h19;
parameter ROW1_B = 8'h1B;
parameter ROW1_C = 8'h1A;
parameter ROW1_D = 8'h1E;
parameter ROW1_E = 8'h1F;
parameter ROW1_F = 8'h1D;
// display 2th line
parameter ROW2_ADDR = 8'h1C;
parameter ROW2_0 = 8'h14;
parameter ROW2_1 = 8'h15;
parameter ROW2_2 = 8'h17;
parameter ROW2_3 = 8'h16;
parameter ROW2_4 = 8'h12;
parameter ROW2_5 = 8'h13;
parameter ROW2_6 = 8'h11;
parameter ROW2_7 = 8'h10;
parameter ROW2_8 = 8'h30;
parameter ROW2_9 = 8'h31;
parameter ROW2_A = 8'h33;
parameter ROW2_B = 8'h32;
parameter ROW2_C = 8'h36;
parameter ROW2_D = 8'h37;
parameter ROW2_E = 8'h35;
parameter ROW2_F = 8'h34;
//---------------------------------------
reg [5:0] current_state, next_state;
// FSM: always1
always @ (posedge clk or negedge rst_n)
begin
if(!rst_n)
current_state <= IDLE;
else if(cmd_flag)
current_state <= next_state;
end
//---------------------------------------
// FSM: always2
always@*
begin
case(current_state)
// lcd init
IDLE : next_state = DISP_SET;
DISP_SET : next_state = DISP_OFF;
DISP_OFF : next_state = CLR_SCR;
CLR_SCR : next_state = CURSOR_SET1;
CURSOR_SET1 : next_state = CURSOR_SET2;
CURSOR_SET2 : next_state = ROW1_ADDR;
// display 1th line
ROW1_ADDR : next_state = ROW1_0;
ROW1_0 : next_state = ROW1_1;
ROW1_1 : next_state = ROW1_2;
ROW1_2 : next_state = ROW1_3;
ROW1_3 : next_state = ROW1_4;
ROW1_4 : next_state = ROW1_5;
ROW1_5 : next_state = ROW1_6;
ROW1_6 : next_state = ROW1_7;
ROW1_7 : next_state = ROW1_8;
ROW1_8 : next_state = ROW1_9;
ROW1_9 : next_state = ROW1_A;
ROW1_A : next_state = ROW1_B;
ROW1_B : next_state = ROW1_C;
ROW1_C : next_state = ROW1_D;
ROW1_D : next_state = ROW1_E;
ROW1_E : next_state = ROW1_F;
ROW1_F : next_state = ROW2_ADDR;
// display 2th line
ROW2_ADDR : next_state = ROW2_0;
ROW2_0 : next_state = ROW2_1;
ROW2_1 : next_state = ROW2_2;
ROW2_2 : next_state = ROW2_3;
ROW2_3 : next_state = ROW2_4;
ROW2_4 : next_state = ROW2_5;
ROW2_5 : next_state = ROW2_6;
ROW2_6 : next_state = ROW2_7;
ROW2_7 : next_state = ROW2_8;
ROW2_8 : next_state = ROW2_9;
ROW2_9 : next_state = ROW2_A;
ROW2_A : next_state = ROW2_B;
ROW2_B : next_state = ROW2_C;
ROW2_C : next_state = ROW2_D;
ROW2_D : next_state = ROW2_E;
ROW2_E : next_state = ROW2_F;
ROW2_F : next_state = ROW1_ADDR;
default : next_state = IDLE ;
endcase
end
//---------------------------------------
// FSM: always3
always @ (posedge clk or negedge rst_n)
begin
if(!rst_n)
begin
lcd_rs <= 0;
lcd_data <= 8'hXX;
end
else if(cmd_flag)
begin
// write statement
case(next_state)
IDLE : lcd_rs <= 0; //statement
//lcd init
DISP_SET : lcd_rs <= 0; //statement
DISP_OFF : lcd_rs <= 0; //statement
CLR_SCR : lcd_rs <= 0; //statement
CURSOR_SET1 : lcd_rs <= 0; //statement
CURSOR_SET2 : lcd_rs <= 0; //statement
// display 1th line
ROW1_ADDR : lcd_rs <= 0; //statement
ROW1_0 : lcd_rs <= 1; //record
ROW1_1 : lcd_rs <= 1; //record
ROW1_2 : lcd_rs <= 1; //record
ROW1_3 : lcd_rs <= 1; //record
ROW1_4 : lcd_rs <= 1; //record
ROW1_5 : lcd_rs <= 1; //record
ROW1_6 : lcd_rs <= 1; //record
ROW1_7 : lcd_rs <= 1; //record
ROW1_8 : lcd_rs <= 1; //record
ROW1_9 : lcd_rs <= 1; //record
ROW1_A : lcd_rs <= 1; //record
ROW1_B : lcd_rs <= 1; //record
ROW1_C : lcd_rs <= 1; //record
ROW1_D : lcd_rs <= 1; //record
ROW1_E : lcd_rs <= 1; //record
ROW1_F : lcd_rs <= 1; //record
// display 2th line
ROW2_ADDR : lcd_rs <= 0; //statement
ROW2_0 : lcd_rs <= 1; //record
ROW2_1 : lcd_rs <= 1; //record
ROW2_2 : lcd_rs <= 1; //record
ROW2_3 : lcd_rs <= 1; //record
ROW2_4 : lcd_rs <= 1; //record
ROW2_5 : lcd_rs <= 1; //record
ROW2_6 : lcd_rs <= 1; //record
ROW2_7 : lcd_rs <= 1; //record
ROW2_8 : lcd_rs <= 1; //record
ROW2_9 : lcd_rs <= 1; //record
ROW2_A : lcd_rs <= 1; //record
ROW2_B : lcd_rs <= 1; //record
ROW2_C : lcd_rs <= 1; //record
ROW2_D : lcd_rs <= 1; //record
ROW2_E : lcd_rs <= 1; //record
ROW2_F : lcd_rs <= 1; //record
endcase
// write lcd_data
case(next_state)
IDLE : lcd_data <= 8'hxx;
//lcd init
DISP_SET : lcd_data <= 8'h38; //set 16X2,5X7 ,8 bits record
DISP_OFF : lcd_data <= 8'h08; //off display
CLR_SCR : lcd_data <= 8'h01; //clear lcd
CURSOR_SET1 : lcd_data <= 8'h06; //cursor set
CURSOR_SET2 : lcd_data <= 8'h0C; //on display
// display 1th line
ROW1_ADDR : lcd_data <= 8'h80;
ROW1_0 : lcd_data <= line_rom1[127:120];
ROW1_1 : lcd_data <= line_rom1[119:112];
ROW1_2 : lcd_data <= line_rom1[111:104];
ROW1_3 : lcd_data <= line_rom1[103: 96];
ROW1_4 : lcd_data <= line_rom1[ 95: 88];
ROW1_5 : lcd_data <= line_rom1[ 87: 80];
ROW1_6 : lcd_data <= line_rom1[ 79: 72];
ROW1_7 : lcd_data <= line_rom1[ 71: 64];
ROW1_8 : lcd_data <= line_rom1[ 63: 56];
ROW1_9 : lcd_data <= line_rom1[ 55: 48];
ROW1_A : lcd_data <= line_rom1[ 47: 40];
ROW1_B : lcd_data <= line_rom1[ 39: 32];
ROW1_C : lcd_data <= line_rom1[ 31: 24];
ROW1_D : lcd_data <= line_rom1[ 23: 16];
ROW1_E : lcd_data <= line_rom1[ 15: 8];
ROW1_F : lcd_data <= line_rom1[ 7: 0];
// display 2th line
ROW2_ADDR : lcd_data <= 8'hC0;
ROW2_0 : lcd_data <= line_rom2[127:120];
ROW2_1 : lcd_data <= line_rom2[119:112];
ROW2_2 : lcd_data <= line_rom2[111:104];
ROW2_3 : lcd_data <= line_rom2[103: 96];
ROW2_4 : lcd_data <= line_rom2[ 95: 88];
ROW2_5 : lcd_data <= line_rom2[ 87: 80];
ROW2_6 : lcd_data <= line_rom2[ 79: 72];
ROW2_7 : lcd_data <= line_rom2[ 71: 64];
ROW2_8 : lcd_data <= line_rom2[ 63: 56];
ROW2_9 : lcd_data <= line_rom2[ 55: 48];
ROW2_A : lcd_data <= line_rom2[ 47: 40];
ROW2_B : lcd_data <= line_rom2[ 39: 32];
ROW2_C : lcd_data <= line_rom2[ 31: 24];
ROW2_D : lcd_data <= line_rom2[ 23: 16];
ROW2_E : lcd_data <= line_rom2[ 15: 8];
ROW2_F : lcd_data <= line_rom2[ 7: 0];
endcase
end
end
endmodule
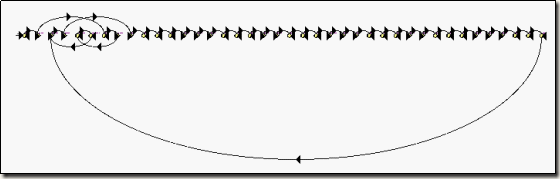
2. 狀態機
(1)以下是State machine如下所示:
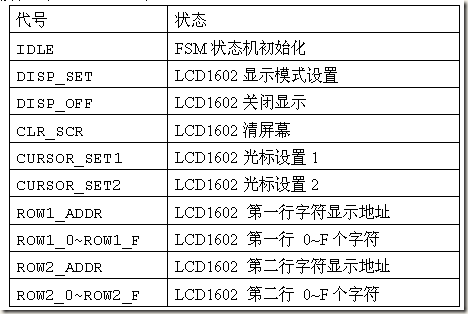
(2)模塊可分為一下幾個狀態
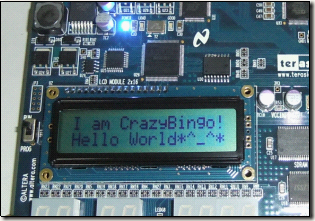
3. “Hello World”實物顯示
parameter [127:0] line_rom1 = "I am CrazyBingo!";
parameter [127:0] line_rom2 = "Hello World*^_^*";

fpga相關文章:fpga是什么
c++相關文章:c++教程












評論