電動自行車應用中的MCU

簡介
本文引用地址:http://www.104case.com/article/272346.htm本文將主要探討采用微控制器或可編程片上系統(PSoC)實現電動自行車的設計技術和相關挑戰。當前業界的電動自行車系統采用微控制器以及外部信號調節和比較器電路來驅動三相電機;采用外部ADC和外部放大器支持不同的傳感器輸入;采用繼電器驅動電路支持剎車燈、車頭燈和轉向燈;此外還可支持LED/LCD顯示屏和溫度測量等。
可編程SOC器件不但可作為電機控制、模擬測量以及直接驅動LCD顯示屏的統一電路板系統用于電動自行車應用,而且還能支持電容式感應技術以取代鍵盤上的機械按鍵。此外,SOC器件還能利用內部PWM、MUX和比較器來驅動和控制三相電機,利用內部ADC和PGA來支持傳感器輸入電池監控,以及利用熱敏電阻或RTD等溫度感應器件來實現溫度感應。該器件不但能直接驅動繼電器,以支持剎車燈、車頭燈和轉向燈,而且能直接驅動LCD顯示屏,以顯示溫度、電池狀態、速度、騎行距離及各種錯誤/警告消息等。
采用基于IDE的工具,可為SoC設計出各種界面和邏輯。這些工具還能提供直接可用的組件模塊,可用于設計更為復雜的邏輯,如監控界面的電容式傳感器、支持模擬傳感器和其它輸入的ADC、驅動蜂鳴器的PWM、DAC以及段式、字符或圖形化LCD顯示屏等。因此,利用可編程SOC,電動自行車系統的開發和生產成本能夠大幅降低。
圖1所示為基本電動自行車系統的方框圖:
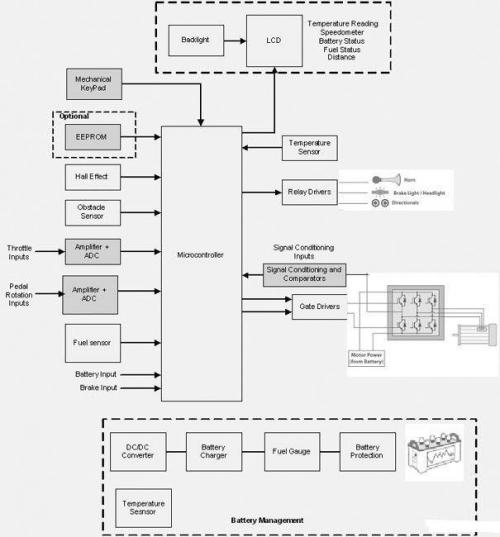
圖1:電動自行車方框圖
微控制器:微控制器通常用于不同傳感器輸入檢測(如節流閥輸入、溫度傳感器、電池輸入、燃料傳感器、障礙傳感器等)、模數轉換、輸出比較組件等,并可驅動和控制三相無刷車用電機。采用電池供電的電動自行車系統需要超低功耗的微控制器。此外,微控制器也是中控鎖系統的一部分,可用來與車輛中使用的各種不同外部器件進行通信。無論何時剎車,均可使用微控制器來自動停止電機旋轉,從而避免電機磨損剎車片的速度超過標準的人力自行車。
輪轂電機:通常情況下,無論有無傳感器(基于霍爾效應),均可采用無刷電機實現高效可靠的運行工作。
可再充電的鉛酸/鋰離子電池:電動自行車應用采用了從鉛酸電池到鋰電池等多種不同的電池類型。其中,可再充電的鉛酸電池在電動車中的應用極其廣泛。
顯示屏與鍵盤:通常情況下,采用帶背光的LCD顯示屏不但能顯示溫度、電池輸入、速度、騎行距離及錯誤/警告消息等,而且還能顯示腳踏板輔助系統和能量生成的等級。電動車應用中也采用基于機械按鍵的鍵盤,而且鍵盤還可支持保護電動車的防盜功能。
電源管理:這個子系統可為各功能模塊的運行提供電源,并監控電池工作。帶比較器和分立邏輯的主機微控制器可用來管理鉛酸電池。此外,這種方法也能為微控制器和用戶提供關于電池的安全和關鍵信息。
原理
目前的電動自行車系統采用16位和32位微控制器。微控制器控制和管理車輛的所有功能和特性。一旦用戶打開點火開關發動電動自行車,微控制器就能獲得輸入,從而啟動三相無刷車用電機。微控制器可接收來自用戶的各種車輛輸入信號,并對車輛進行相應的操控。微控制器按照用戶所選擇的速度驅動三相無刷車用電機,電機的速度可根據用戶的加速和制動傳感器輸入進行變化和控制。
微控制器采用內部或外部串行EEPROM(I2C/SPI型)來存儲距離讀數等數據。此外,微控制器還采用實時時鐘(RTC)在顯示屏上顯示準確的時間。
溫度測量由板上RTD或熱敏電阻型溫度感應器件來實現。電動自行車系統還能利用障礙傳感器在泊車時獲取附近車輛的信息。燃料傳感器獲取引擎中的燃料信息,微控制器也可監控電池輸入并將其在LCD顯示屏上顯示。繼電器驅動電路則用于切換剎車燈、車頭燈和轉向燈的開/關等。
供電部分由作為電源的可再充電鉛酸或鋰離子電池組成,且必須滿足電池充電器的規定。電池輸入向下轉換為DC電壓,以便為微控制器和其它電路提供動力。點火開關則可啟用或禁用板上穩壓器。此外,供電部分還可提供電池、過流、過熱及啟動故障狀態保護電路等多種保護功能。OEM廠商也會對手機等外部設備的充電做出相應規定。
圖2所示為基于可編程SOC的電動自行車系統:
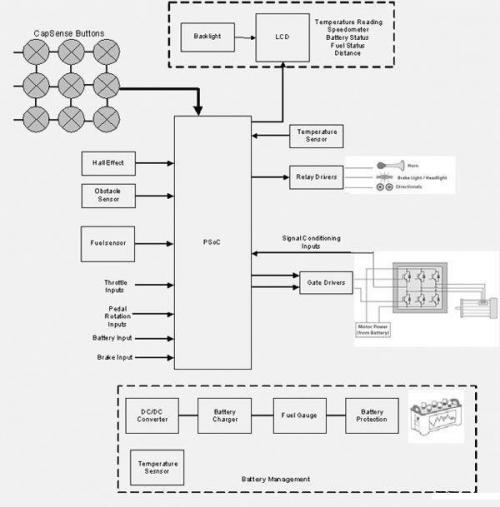
圖2:基于PSoC的電動自行車解決方案方框圖
電動自行車系統的實現
為給出電動自行車系統的實際實現方案,本文介紹了一款基于賽普拉斯PSoC 4的設計。PSoC 4器件完美集成了帶數字可編程邏輯的微控制器、高性能模數轉換、帶比較器模式的運算放大器以及標準的通信和時序外設等。微控制器為32位的ARM Cortex M0,工作頻率高達48 MHz,并可提供最大32 KB的閃存和最大4 KB的SRAM以及2 KB的內部EEPROM.
該實現方案采用板上6個P型通道(P-Channel)MOSFET和門驅動器電路來驅動三相無刷電機。PSoC 4器件帶有內置PWM、時鐘、多路轉換器和比較器,可用來驅動和控制三相無刷電機。此外,內置的16位PWM將用于驅動控制電機的FET門驅動器電路。而PWM的占空比根據用戶設置所需的速度而各不相同。
PSoC4帶有內部運算放大器、PGA、比較器和12位1MSPS SAR ADC,可提供差動和單端模式,包括采樣保持(S/H)功能。ADC可通過改變PWM占空比來控制電機速度,并測量不同的傳感器輸入以滿足電池監控、低成本溫度感應、障礙感應和燃料感應等需求。這樣系統就無需采用任何外部放大器、ADC或比較器。
利用兩個電流DAC(IDAC),該系統可具備通用感應功能,且能夠利用任何引腳上的電容式感應技術。PSoC 4架構支持電容式感應組件,該組件同時支持手動和自動調校。采用電容式界面可幫助整個電動自行車系統實現防水性,同時也能直接驅動繼電器,從而充分滿足喇叭、剎車燈、車頭燈、轉向燈和LCD顯示屏等需求。該器件的工作電壓范圍介于1.71V到5.5V之間,能與其它外部外設輕松連接,從而實現更多功能。此外,PSoC 4還支持兩個獨立的在運行中可重配置串行通信模塊(SCB),此模塊帶可重配置的I2C、SPI或UART功能,可用于內外部外設通信。
該實現方案采用可再充電的鉛酸或鋰離子電池作為電源。輸入電壓通過板上降壓穩壓器進行下變頻轉換。1.71 V的較低工作電壓和超低功耗運行,再加上冬眠和深度休眠模式,可支持喚醒時間和功耗折中方案,從而實現更長的電池使用壽命。
采用PSoC Creator IDE工具,我們能通過隨時可用的組件模塊設計出所有的接口和邏輯,包括面向模擬傳感器和其它輸入的SARADC和PGA;面向電機驅動應用的PWM、CLK、MUX和比較器等組件;面向直接驅動字符和段式LCD的組件;面向電動自行車應用中CAN協議接口的CAN組件;以及通過內部系統時鐘進行實時測量、從而讓系統不再需要外部時鐘/振蕩器電路的RTC組件等。
此外,PSoC Creator還支持工程師訪問包括集成編譯器工具鏈、RTOSes和量產編程器在內的完整的工具生態系統。有了PSoC Creator,開發人員就可利用分層原理圖設計創建并共享用戶自定義的定制外設。然后,他們能對所選定的組件實現自動布局布線,并集成簡單的粘接邏輯(通常位于分立多路轉換器中)。
過流保護用于關閉電機驅動PWM,因而可停止電機運行。PSoC 4器件采用基于比較器的PWM Kill信號觸發,可在檢測到過流情況時終止電機驅動。該模塊的輸入來自總線電流,其截止參考可設為電機消耗的最大電流。總線電流輸入饋送到比較器和可配置的截止參考,并由DAC進行設置。如果總線電流低于參考閾值,那么比較器輸出設為高。比較器輸出連接到PWM的“KILL”信號輸入。當“KILL”輸入為高時,PWM輸出關閉,從而可避免電機受損。該完整模塊的實現方案將采用PSoC creator組件,且無需設計人員編寫的任何固件。

pwm相關文章:pwm是什么
比較器相關文章:比較器工作原理
霍爾傳感器相關文章:霍爾傳感器工作原理
蜂鳴器相關文章:蜂鳴器原理 霍爾傳感器相關文章:霍爾傳感器原理









評論