車載信息系統終端的研究與設計

2.2.2 CAN協議與串口協議網關設計
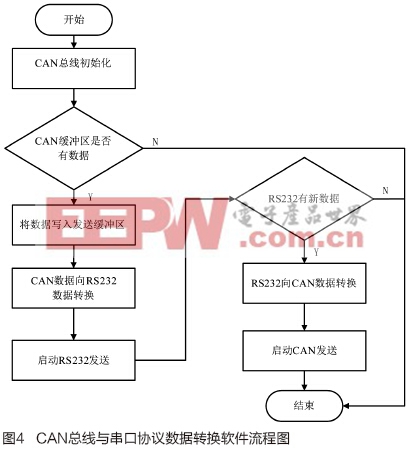
本文引用地址:http://www.104case.com/article/271646.htm CAN總線協議與STM32的串口協議格式并不一致,若要實現CAN總線與串口之間數據的雙向傳輸,需進行串口協議與CAN總線協議的轉換。CAN總線與串口之間需要進行電平標準和通信協議的轉換。本次設計使用PeliCAN模式的標準幀格式,總線傳輸波特率為125kb/s,當單片機串口檢測到緩沖區有數據時,則將該數據封裝成CAN總線的幀格式,由CAN總線進行數據的發送。反之亦然,當CAN總線上的數據需要通過串口發送時,將CAN總線緩沖區內的數據轉換為串口數據格式然后發送出去,這樣即可完成實現CAN總線與串口之間的通信,其轉換流程圖如圖4所示。
3 系統的測試與結論
為了配合車載終端的測試,論文開發了上位機監控中心和Android手機客戶端,在系統的硬件、軟件以及上位機設計均已經完成之后,對系統進行測試,車載終端與CAN總線聯合調試如圖5所示。根據測試結果,車載終端工作正常,可以與CAN總線以及上位機之間進行通信實現相應功能。驗證了車載終端軟件、硬件設計方案的可行性,可以為相關車聯網研究提供有力的參考。

參考文獻:
[1]TSUGAWAS. Inter vehicle communications and their applications to intelligent vehicles: an overview[C]//IEEE Intelligent Vehicle Symposium,2002:564-569
[2]王建強,吳辰文,李曉軍.車聯網架構與關鍵技術研究[J].微計算機信息.2011,27(4):156-159
[3]楊瑞.工程車輛聯網系統及軟件平臺設計[D].杭州:浙江大學,2012
[4]張偉.基于GPS和GPRS的多功能車載終端的設計[D].武漢:武漢理工大學,2011
[5]張劍武.基于CAN總線的汽車信息平臺的數據獲取[D].上海:華東師范大學,2011
[6]Davis RI, Burns A, Bril RJ. Lukkien JJ(2007) Controller area network(CAN) schedulability analysis: refuted, revisited and revised[J]. Real-Time System, 35(3):239~272
[7]向前勇.基于單片機的GPS導航裝置的設計[D] .成都:西南石油大學,2009
[8]王云午,魏宗壽.基于CAN總線的通信節點設計[J].現代電子技術.2008,33(11):266-268

手機電池相關文章:手機電池修復











評論