深入了解掃描陣列雷達信號處理

從信號到目標
本文引用地址:http://www.104case.com/article/269461.htm脈沖壓縮是這一抽象過程的開始。在時間域或者頻域,脈沖壓縮器一般通過自相關找到有可能含有發送啁啾的波形。然后,它采用脈沖目標來表示這些波形 —— 含有到達時間、頻率和相位以及其他相關數據的數據包。從這里開始,接收鏈會處理這一數據包而不是接收到的信號。
下 一步一般是多普勒處理。首先,脈沖被送入方格陣列中( 圖 3 ) 。在陣列中,每一列含有從某一發射器啁啾返回的脈沖。陣列中會有很多列,這取決于系統能夠承受多大的延時。陣列中的行表示返回切換時間:距離陣列的 x 軸越遠,發射器啁啾和接收脈沖到達時間之間的延時就越大。這樣,延時方格也代表了與某一脈沖反射的目標的距離。
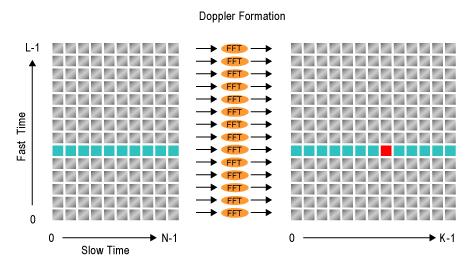
圖 3 .多普勒處理方格。
把一系列啁啾脈沖置入到正確的方格中后 , 多普勒處理程序水平移動數據 —— 觀察從一個目標返回的脈沖隨時間的變化 , 提取出相對速度和目標頭部信息。這一處理方法需要很大的環形緩沖,無論某一多普勒算法一次能夠處理多少方格,緩沖都能夠容納所有的方格。
先進系統在陣列中增加了另一個維度。通過把天線劃分成子陣列,系統可以同時發送多個波束,然后,使用相同的多旁瓣天線方向圖設置接收器進行監聽。或者,系統 通過聚束或者使用合成孔徑方法來掃描波束。現在,當裝入壓縮后的脈沖時,系統建立一個三維方格陣列:一個軸上是發送脈沖,第二個是返回延時,第三個是波束 方位( 圖 4 ) 。現在,對于每一路脈沖,我們有兩維或者三維方格陣列,同時表示距離和方向 —— 表示物理空間。這種存儲器的排列是空時自適應處理 (STAP) 的起點。
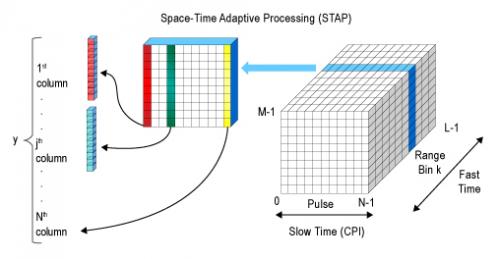
圖 4 .多維方格為STAP建立矩陣。
這一術語可以解釋為 :“ 空時” , 數據組在 3D 空間統一了目標的位置 , 含有與目標相關的啁啾時間。之所以是“自適應”,是因為算法從數據中獲得自適應濾波。
概 念上,實際情況也是如此,構成自適應濾波器是一個矩陣求逆過程:這一數據要與哪一矩陣相乘,得到噪聲中隱藏的結果 ? 據Altera資深技術營銷經理Michael Parker,推測的隱藏方向圖信息可能來自多普勒處理過程發現的種子,從其他傳感器采集的數據,或者來自智能數據。運行在 CPU 下游的算法把假設的方向圖插入到矩陣方程中,解出能夠產生預期數據的濾波函數。
很顯然,在這一點,計算負載非常大。反變換算法需要的動 態范圍要求進行浮點計算。對于戰斗環境中一個實際的中等規模系統,必須實時進行處理,Parker估算了STAP負載會達到幾個 TFLOPS 。在采用了低分辨率、窄動態范圍的系統中,實時性要求并不高,例如,簡單的汽車輔助駕駛系統或者合成孔徑映射系統等,這一負載會顯著減小。
從 STAP ,信息進入到通用CPU中,復雜但是數字計算量小,軟件嘗試對目標進行分類,構建環境模型,估算威脅所在,或者告訴操作員,或者直接采取緊急措施。在這一點,我們不但在信號處理域處理信號,而且還進入了人工智能領域。
兩種體系結構
從一名經驗豐富的雷達系統設計師的角度看,我們還只是膚淺的了解了 AESA 戰斗雷達。這一參考方法把網絡看成是相對靜態的 DSP 鏈,都連接至STA 模塊,其本身是軟件受控的矩陣算術單元。除此之外,從 DSP 專家的角度看,是一組 CPU 內核。
作為對比,汽車或者機器人系統設計人員會從完全不同的角度看系統。從嵌入式設計人員的角度看,系統只是一大段軟件,有一些非常專用的 I/O 器件,以及需要進行加速的某些任務。有經驗的雷達信號工程師考慮到信號處理和通用硬件的相對規模,可能會對這一方法不屑一顧。很顯然,機載多功能雷達的數 據速率、靈活性和動態范圍要求采用專用 DSP 流水線以及大量的本地緩沖才能完成實時處理。但是對于有幾個天線單元的不同應用,簡單的環境、更短的距離和較低的分辨率,以 CPU 為中心的觀點帶來了一些有意思的問題。
萊斯大學的 Gene Frantz 教授提出的第一個問題是,定義真實環境的 I/O 。第二個問題是選擇 CPU 。 Frantz 注意到,“很少只有一個 CPU 。更常見的是異構多處理系統。” Frantz 建議這一方法不從 MATLAB 中的 DSP 函數開始,而是從 C 語言中描述的完整系統開始。然后,以 CPU 為中心的設計人員不是定義設計中 DSP 和 CPU 域之間的硬件邊界,而是“不斷優化并加速 C 代碼。”
實際結果可能與以 DSP 為中心的方法完全不同。例如,以 CPU 為中心的方法一開始假設在一片通用 CPU 上執行所有工作。如果速度不夠快,這一方法轉向多片 CPU ,共享一個分層的連續存儲器。只有當多核不足以完成任務時,這一方法才轉向優化的硬件加速器。
相似的,以 CPU 為中心的設計從假設一個統一的存儲器開始。它為每一個處理器分配連續高速緩存,為加速器分配本地工作存儲器。它開始時并不假設任何硬件流水線,也不把任務混合映射到硬件資源上。

模擬信號相關文章:什么是模擬信號
模數轉換器相關文章:模數轉換器工作原理



評論