基于OMAP3530平臺(tái)的車道線識(shí)別檢測(cè)的實(shí)現(xiàn)

程序段2設(shè)置像素格式
本文引用地址:http://www.104case.com/article/269117.htm(4)申請(qǐng)緩存區(qū),并獲取每個(gè)緩存的信息
V4l2捕獲的數(shù)據(jù),是存放在內(nèi)核空間里的,用戶不能直接訪問該段內(nèi)存,必須通過某些方法來轉(zhuǎn)換地址。這里我們采用mmap映射方式,相關(guān)代碼見程序段3.
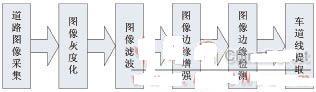
圖1車道線識(shí)別算法流程圖

圖2路面邊緣示意圖
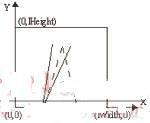
圖3干擾直線
———————————————————————
req.count=4;
req.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory=V4L2_MEMORY_MMAP;
ioctl(fd,VIDIOC_REQBUFS,
———————————————————————
程序段3映射內(nèi)核空間到用戶空間
(5)開始采集視頻
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd, VIDIOC_STREAMON,
(6)取出緩沖區(qū)中已經(jīng)采樣的緩存
ioctl(fd,VIDIOC_DQBUF,
(7)停止采集和關(guān)閉設(shè)備
int close_v4l2(void)
{ ioctl(fd, VIDIOC_STREAMOFF,
…}
實(shí)驗(yàn)測(cè)試
本文設(shè)計(jì)的視頻圖像采集模塊及測(cè)試演示系統(tǒng)實(shí)物圖如圖4所示。
在學(xué)校外的新蘭路上采集到了回旋曲線、拋物線、直線三種結(jié)構(gòu)化道路圖像,對(duì)采集到的三種道路圖像應(yīng)用車道線識(shí)別算法處理,提取出車道標(biāo)志線,效果圖如5所示。從效果圖中可以看出該算法基本上對(duì)由光照的強(qiáng)弱、對(duì)陰影區(qū)域和對(duì)道路的質(zhì)量等造成的問題影響不大,表現(xiàn)出很好的識(shí)別效果。
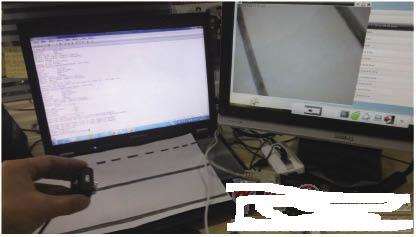
圖4視頻圖像采集演示系統(tǒng)

圖5三種結(jié)構(gòu)化道路車道線提取效果圖
全息投影相關(guān)文章:全息投影原理








評(píng)論