基于CC1110無線單片機的機器魚控制系統設計

魚類的游動具有高效性、機動性以及低噪性等優點。因此,仿生機器魚的研究己成為機器人研究領域的熱點。隨著仿生機器魚研究的不斷深入,仿生機器魚在水下搜救、水質檢測以及海洋資源勘探等領域發揮著重要的作用。近年來,機器魚也成為國內國際高校機器人比賽項目之一。本文就是針對在國際水中機器人大賽的大平臺上的三關節機器魚而設計的一套雙關節機器魚控制系統。本機器魚控制系統具有體積小、成本低、微功耗等優點,可以方便地運用到類似的機器魚產品中。
本文引用地址:http://www.104case.com/article/267501.htm1機器魚控制系統設計方案
機器魚控制系統總體結構如圖1所示。系統主要分為指令發送端和指令執行端,兩部分均以CC1110無線單片機作為核心控制器,負責指令的發送、接收、數據處理,進而控制機器魚的相關執行機構工作。指令發送端的指令來自上位機,USB串口轉換電路將USB接口模擬成串口,實現上位機與CC1110的串口通信。電源模塊完成電壓的變換,為相關電路提供各種合適的工作電壓。存儲器模塊存儲機器魚的相關信息。舵機驅動模塊為執行機構舵機提供合適的控制信號。
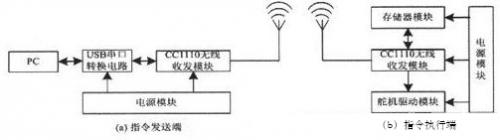
圖1機器魚控制系統總體結構圖
2機器魚控制系統硬件設計
2.1 USB串口轉換電路
CH341T是一款USB總線轉接芯片,通過簡單的接線即可實現USB接口和串口之間的轉換,此時無需改動上位機與下位機的程序,通過USB接口即可實現上位機與下位機的串行通信。USB串口轉換電路原理圖如圖2所示。
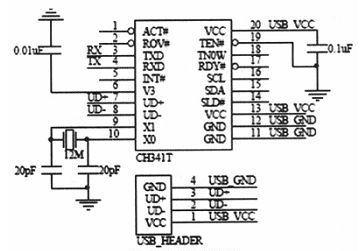
圖2 USB串口轉換電路
在本設計電路中,將CH341T芯片的SDA和SCL引腳懸空,此時芯片功能為USB轉異步串口,模擬計算機串口;CH341T芯片的TXD和RXD兩個引腳分別連接到CC1110無線單片機的RX(P0.2)和TX(P0.3)兩個引腳;TEN#引腳為串口發送使能端,接地使CH341T能發送數據。CH341T芯片的地要和CC1110無線單片機的地相連。CH341T不需外接電源,直接由上位機通過USB口提供+5V電源。
2.2 DC-DC電壓變換電路
指令發送端由USB提供5V電壓,指令執行端由電池提供5V直流電壓。電池提供的5V直流電壓可以直接為舵機驅動芯片以及舵機供電。而系統內部CC1110無線單片機正常工作電壓范圍是2.0~3.6V,存儲器芯片24AA01正常工作電壓范圍是1.7~5.5V,這里可以將二者的工作電壓選擇為3.3V.為此,專門設計了一個DC-DC電壓變換電路,將5V直流電壓變換為3.3V直流電壓后再提供給CC1110無線單片機和24AA01芯片,以保證系統的正常工作。這里采用AMS公司生產的AMS1117芯片設計了電壓變換電路,具體的DC-DC電壓變換電路如圖3所示。
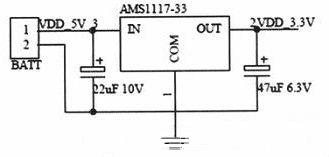
圖3 DC-DC電壓變換電路
在電壓輸入端接有22μF電解電容及電壓輸出端接有47μF電解電容,以保證輸出電壓的穩定。












評論