基于MSP430自動往返小車的設計

設計了一個自動往返和智能控制的小車。采用MSP430F149為核心芯片,選用雙全橋驅動芯片作為小車電機驅動,利用PWM技術動態控制電動機的轉速,紅外線光電傳感器檢測標識線,U型紅外光電傳感器測量路程。MCU判斷和處理各種傳感器傳回的信息,向電機驅動器發出指令,控制小車在往返過程中實現自動加速、限速、減速、剎車、倒車和在液晶顯示器上顯示行駛時間,行駛路程等相關數據。
本文引用地址:http://www.104case.com/article/267438.htm智能小車,是一種以汽車電子為背景,涵蓋智能控制、模式識別、傳感技術、電子電氣、計算機、機械等多學科的科技創意性設計。全國電子大賽和省內電子大賽幾乎每次都有智能小車這方面的題目,全國各高校也都很重視該題目的研究,可實現循跡、避障、檢測貼片、尋光入庫、避崖等基本功能。
1總體方案
設計一個能自動往返于起跑線與終點線間的小汽車,從起跑線出發到達終點線后停留10 s,然后自動倒車返回起跑線。在要求的跑道范圍內完成加速、減速、限速、剎車、倒車等功能。停車后顯示一次往返的時間和路程。
電路設計原理框圖如圖1所示,可分為MSP430F149、電路驅動模塊、黑線檢測模塊、測速測距模塊,顯示模塊等幾部分。
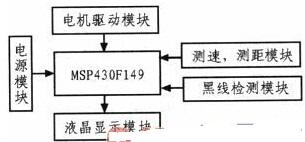
圖1 電路設計原理框圖
采用MSP430F149為核心芯片,選用雙全橋驅動芯片L298作為小車電機驅動,利用PWM技術動態控制電動機的轉速,紅外線光電傳感器(LTH1550)檢測標識線,U型紅外光電傳感器測量路程,在液晶顯示器上顯示行駛時間、行駛路程等相關數據。微處理器主要處理光電傳感器傳回的地面檢測標志信號和U型傳感器傳回的檢測路程信息,向電機驅動器發出指令,控制小車的加速、減速、限速、剎車、倒車等狀態,在液晶顯示器上顯示行駛時間、行駛路程等相關數據。
2各單元模塊設計
2.1微處理器模塊
微處理器的主要任務是判斷和處理各種傳感器傳回的信息,向電機驅動器發出指令,控制小車在往返過程中實現自動加速、限速、減速、剎車、倒車,因為小車實現功能較少,微處理器選用美國TI公司MSP430系列單片機。由于MSP430單片機具有低功耗、高速實時控制以及數據計算,并且擁有更多的片上資源供設計使用,使得設計更加簡練更加有效。
2.2電機驅動模塊
采用直流減速電機。直流減速電機轉動力矩大,體積小,重量輕,裝配簡單;過載能力強,能承受頻繁的沖擊負載,可實現頻繁的快速啟動和反轉;能滿足自動往返過程中各種不同的特殊形式要求;可以很方便的實現通過單片機對直流減速電機前進、后退、停止等操作。
考慮到小車必須能夠前進、倒退、停止,并能靈活專性,選用L298雙全橋步進電機專用驅動芯片。內部包含4信道邏輯驅動電路,可以方便的驅動兩個直流電機或一個兩相步進電機。為了能控制車輪的轉速,可以采取PWM調速法,即由單片機的P1.4和P1.5輸出一系列頻率固定的方波,再通過功率放大來驅動電機,在單片機中編程改變輸出方波的占空比就可以改變加到電機上的平均電壓,從而可以改變電機的轉速。左右兩輪兩個電機轉速的配合就可以實現小車的前進、倒退、等功能。
2.3黑線探測模塊
黑線探測的原理是光線照射到路面并反射,由于黑線和白線的反射系數不同,可根據接收到的反射光強弱判斷是否到達黑線。考慮到環境光干擾主要是直流分量,如果采用帶有交流分量的控制調制信號,則可大幅度減少外界干擾;另外,紅外發生管的最大工作電流取決于平均電流,如果使用占空比小的調制信號,在平均電流不變的情況下,瞬時電流可以很大(50~100 mA),這樣也大大提高信噪比。設計采用紅外線光電反射傳感器,鑒于車底盤低,采用近距離有效的光電傳感器(LTH1550),是由高發射功率紅外廣電二極管和高靈敏度光電體管組成。檢測距離可調整范圍為4~15 mm;采用非接觸檢測方式。為了減少環境光的干擾,需要調整傳感器的方位使環境光不能直接射到探測器。最佳探測距離為6~14 mm,在安裝時應與地面保持10 mm左右的距離。
2.4測速、測距傳感器
由于小車車輪較小,U型傳感器適用于精度較高的場合,可以在車輪上加較多的黑線來滿足脈沖計數的精度要求。采用U型紅外光電傳感器,在電機轉軸上加裝測速碼盤,可以在安裝好小齒輪后,將測速碼盤安放在小齒輪下,當作光電編碼盤,當電機轉動時,帶動碼盤轉動,利用紅外傳感器對不同顏色的物體反射的光線強度的不同,改變接收管的導通和截止。用外部中斷對接收到的信號進行計數。
U型傳感器可以精確的計算出小車的里程。將碼盤固定于小車后輪上,將U型光電開關架于碼盤之上。電機旋軸轉動,帶動測速碼盤轉動,測速碼盤上刻有許多狹縫,碼盤轉動時發射光透過狹縫被接收元件接收,光電開關就會不斷地發生導通和截止。這樣在光電開關的輸出端就會得到脈沖,用計數器對接受到的信號進行計數。
2.5液晶顯示模塊
系統主要需要顯示小車運行時間、里程等各個測量參數。采用LCD1602液晶顯示,用自帶中文字符庫的液晶顯示模塊,顯示方便美觀,顯示信息量大,顯示速度較快。采用串口通訊的顯示方式,可以大大節省單片機的IO口。
3主電路工作原理分析
小車開始置于快速前行狀態,紅外傳感器LTH1550檢測地面黑線,信號通過單片機的P1.0傳回微處理器,經處理器判斷分析,根據到達不同的信號,通過P1.4、P1.5輸出不同占空比的PWM波驅使電機,使小車置于不同的前行狀態,實現自動加速、限速、減速、剎車、倒車等功能。返回起跑線后微處理器從自身計時功能TBR取出行駛時間,在LCD1 602顯示,同時經U型傳感器檢測的里程信息經單片機的P2.3傳回微處理器處理后在顯示器上顯示。
4結束語
系統采用MSP430F149與各種傳感器組合控制不僅具有控制方便、系統電路簡單、靈活性強等特點,還通過C語言編程控制和PWM脈寬調制技術的結合,提高了對小車位置的控制精度,并且實現了低速段車速的恒速控制。

pwm相關文章:pwm是什么
c語言相關文章:c語言教程
電流變送器相關文章:電流變送器原理 光電開關相關文章:光電開關原理 脈寬調制相關文章:脈寬調制原理









評論