基于Cortex-M3處理器的步進電機控制系統

(2)步進電機共引出4根控制線。其中,1 A與1 B、2 A與2 B分別是電機內兩組線圈的兩個抽頭。以不同的順序控制兩組線圈中的電流方向可使步進電機按照不同的方向轉動。兩相步進電機的4根控制線分為兩組,分別與SPGT62C19B驅動芯片的兩個輸出通道連接,通過SPGT62C19B芯片的6個控制引腳使兩個輸出通道發出驅動步進電機的脈沖信號。
本文引用地址:http://www.104case.com/article/266847.htmSFM32F103VBT6微控制器作為主控芯片,通過I/O端口對SPGT62C19B電機驅動芯片進行控制,從而實現對步進電機的控制。系統連接圖如圖3所示。
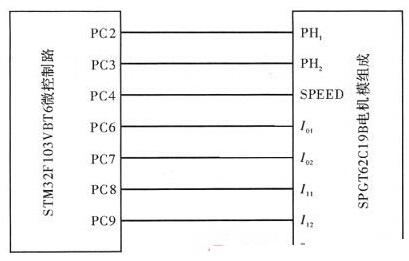
圖3 主控芯片與電機模組的連接示意圖
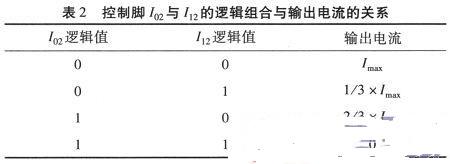
PH1和PH2控制電機轉動方向,SPEED用于測速。I01與I11、I02與I12分別控制著通道1和通道2的電流大小。以通道2為例,控制口I02與I12的不同邏輯組合可使通道2輸出端輸出不同大小的電流。
1.4觸摸屏模塊
設計采用迪文DMT64480T056-01W智能顯示終端,其擁有集成的標準字庫、可選擇操作模式、圖形界面操作、多控制器選擇等特點。液晶觸摸屏主要用于顯示速度、時間、距離以及能提供外界選擇功能的選擇按鈕。
STM32開發板引出了兩路UART,UART1(CN11)和UART2(CN6),本文通過UART1與觸摸屏相連的。兩路串口均連接到DB9.觸摸屏界面中要包括:啟動、停止、暫停、正轉、反轉、加速、減速。基于以上的內容選擇了如圖4所示的界面。
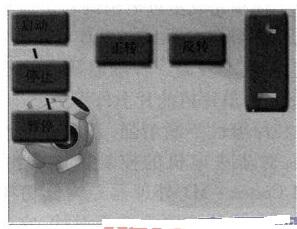
圖4 觸摸屏界面
界面制作使用SysDefDownload文件,代碼選擇指定代碼,如圖5所示,命令代碼:在本次實驗中加速為0x01、減速為0x02、啟動為0x03、停止為0x04、正轉為0x05、反轉為0x06、暫停為0x07;最后點擊生成bin文件,如圖6所示。

圖5 軟件主界面

圖6 生成配置文件窗口









評論