GPRS_ZigBee技術的公交車智能監控系統

2.2.1 ZigBee無線通信模塊
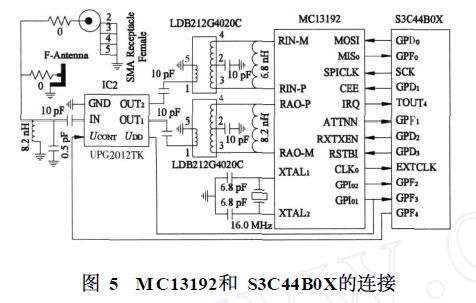
本文引用地址:http://www.104case.com/article/265570.htm由于MC13192的射頻信號采用差分方式,而倒F型天線為單端天線,所以在芯片和天線間需使用平衡/非平衡阻抗轉換電路,以達到最佳收發效果。
電路中使用了UPG2012TK和巴倫電路專用芯片LDB212G4020C。UPG2012TK是NEC公司針對手機和其他L-波段應用制造的鎵砷單刀雙擲(SinglePoleDoubleThrow,SPDT)射頻開關,其工作頻率為015~215GHz,具有非常低的介入損耗和很高的隔離性能。MC13192和S3C44B0X的連接如圖5所示。
2.2.2 LED屏顯示模塊
設計中的LED點陣屏幕由4個LED點陣模塊構成,模塊需要陽極與陰極共同控制,其行為陽極,列為陰極,所以把LED點陣屏幕驅動電路分為行驅動電路與列驅動電路兩部分設計,如圖6所示。行驅動電路采用16個8050D型NPN三極管和16個上拉電阻共同完成驅動。列驅動電路則是由16個S8550D型PNP三極管和16個上拉電阻共同完成驅動。
因而失真小,使用方便,不需專用語音開發工具,成本低廉。鍵盤采用獨立式鍵盤,驅動芯片采用ZLG7290。RS232通訊部分由MAX233A完成。復位部分采用專業復位電路芯片IMP811來實現。
3 軟件設計
設計中使用分布式地址分配方案來分配ZigBee網絡地址,采用對等網絡結構構建網絡,監測器作為父設備,無線終端作為子設備。終點站的父設備作為網絡協調器啟動網絡的建立,選擇一個信道,確定唯一的PAN地址并廣播建立網絡信息。該父設備建立網絡后,設置自身地址為0X0000,其他監測器作為路由器、無線終端作為終端節點加入網絡。網絡地址的分配與3個參數有關,分別為允許的最大子節點數Cm、允許的最大路由節點數Rm和允許的最大網絡深度Lm,根據這3個參數可自下而上地計算出每一級鄰近節點間的地址間隔Is(d):

其中,An為同等級深度節點中序列為n的節點,1≤n≤Cm-Rm,Ap為其上一級父節點地址。
3.2 軟件流程
系統的軟件設計包含三部分:無線終端、監測器和監控中心軟件設計,文中只介紹無線終端和監測站軟件設計,監控中心軟件設計請讀者參閱其他資料。
監測器通電后,進行Q2403和ZigBee的初始化和ZigBee通信的準備工作,等待ZigBee設備的連接請求。當接收到某設備的連接請求后,確認是否為合法用戶,如果是則發出允許連接的命令,實現無線終端和監測器的無線連接。建立連接后,監測器獲得了公交車的唯一標識號,將該公交車進行登記,并將車號和時間信息通過GPRS網絡發送給監控中心。當公交車離開站臺后,信號強度下降到一定程度,公交車與該監測器斷開連接,認為該公交車已離開該站。監測站還時刻接收監控中心發送的公交車運行狀態信息,并通過運行狀態指示燈顯示給候車者。工作流程如圖7所示。
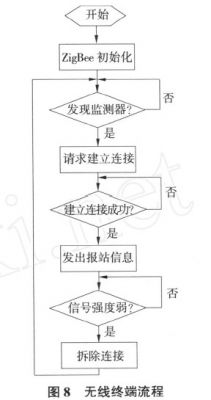
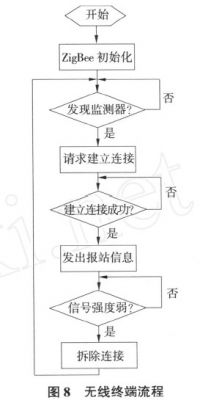
無線終端通電后進行ZigBee初始化工作,尋找監測器,當檢測到監測器的信號強度大于一定值時,向該監測器發出建立連接的請求,獲得該監測器的標識符,從而知道是哪一站,并采用語音和LED屏實現自動報站。當駛離站臺監測器時,檢測到該監測器的信號強度弱小到一定程度,便向該監測器發出斷開連接請求。其工作流程如圖8所示。
4 結語
將GPRS和ZigBee技術應用到公交車智能監控系統,解決了多年來困擾公交車監控系統的諸多問題,使其作用更為突出,提高了公交車的服務質量和運行效率,具有很高的實用價值。在該系統中,遠距離無線通信采用的GPRS技術和近距離無線通信采用的ZigBee技術互為補充,在擴寬監測范圍的同時也提高了監控系統的智能水平。這種監測網絡模型具有一定的通用性,可以推廣應用到石油和煤礦生產等工作地域范圍較廣的工業現場。







評論