基于ARM和智能手機的藍牙CAN分析儀設計

針對CAN總線通信質量、測試和驗證的需要,以及傳統CAN分析儀的復雜性,且必須選擇PC機作為顯示終端的不足,論證了一種基于ARM單片機和智能手機的CAN總線分析儀設計。該分析儀采用以ARM單片機為核心的硬件電路完成對CAN網絡的實時數據收集和監控;采用藍牙通信方式實現分析儀與智能手機的通信并以智能手機為終端完成數據分析。文章對分析儀硬件、軟件和智能手機頁面進行了具體設計,提出了一種新的波特率自動檢測方法,最后給出了所設計的CAN總線分析儀的實際試驗結果,可實現CAN總線波特率自動檢測、正常監測以及CAN總線狀態分析的功能。
本文引用地址:http://www.104case.com/article/264105.htmCAN(controller area network)控制器局域網絡是一種實時性強、靈活性好、標準化程度高的串行數據總線,廣泛應用于汽車電子、工業自動化、船舶、醫療設備、工業設備等領域。其測試設備CAN網絡分析儀成為開發者的必備設備。借助使用方便的CAN總線分析儀,能夠快速找到CAN總線系統在使用中出現的設計不周或異常干擾問題,并將故障和問題排除。
傳統CAN分析儀需要將電腦通過USB連接到CAN分析儀上,再通過DB9接口將被測總線連接到CAN分析儀上。由于CAN總線是一種流行于車輛行業的現場總線,這樣的調試方法對于需要路測的車輛就會顯得不太方便,很難保證能夠正常工作。同樣,在工業控制領域,傳統的CAN分析儀由于兩段都有連線,在線束較多的工業現場可能會造成一定的混亂。此外,當今使用CAN總線的設備為了保證安全性,有時不止1根總線,傳統的分析儀至多有2個接口,也就意味著想要同時測試2個以上CAN總線時就需要2個USB接口,如果這2條CAN總線相距較遠則需要較長的USB連接線。為此,這里介紹一種成本低、體積小、結構簡單、實現無線調試和對環境要求低的藍牙CAN總線分析儀。
1 硬件設計
1.1 總體設計
針對傳統CAN分析儀的各種缺點,本文提出了以智能手機代替PC機作為顯示終端,使用藍牙無線傳輸替代USB電纜傳輸,并且自帶鋰電池的新型CAN分析儀。總體設計結構如圖1所示。
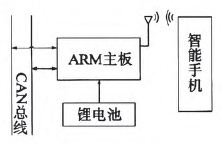
圖1 藍牙CAN分析儀總體設計框圖
由于CAN分析儀是一種波特率較高的通信協議,且對通信質量分析和故障定位需要復雜的運算處理,所以本文提出的藍牙CAN分析儀在整體設計中包含3個部分:一部分是以ARM為處理核心的處理主板,負責CAN總線波特率檢測、數據采集以及藍牙通信信號發射;第二部分是鋰電池,負責給主板提供電源,鋰電池電壓為5V,容量為3 000mAh,尺寸為11.6mm X42mm×69ram,可保證系統工作lOh以上;第三部分為智能手機,負責接收CAN總線數據以及對數據的處理。
1.2 主板設計
主板上有4個模塊,分別為隔離CAN接口模塊、ARM處理器模塊、藍牙串口模塊、電源電路模塊。設計框圖如圖2所示,實物圖如圖3所示。
隔離CAN接口模塊負責將ARM的數據發送到CAN總線上,并將CAN總線上的數據發送給ARM處理器。

圖2 主板系統設計框圖
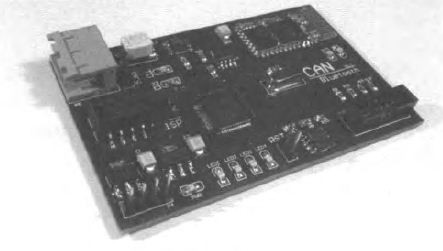
圖3 主板買物圖
ARM處理器模塊是本分析儀的核心,采用NXP公司的LPC2119處理器。LPC2119是基于一個支持實時仿真和跟蹤的16/32位ARM7TDMI-STM CPU,帶有128KB嵌入高速Flash存儲器,并內部集成2個CAN控制器。其主要特點是:單個總線上的數據傳輸速率高達1MB/s;32位寄存器和RAM訪問;兼容CAN2.0B,IS011898.1規范;全局驗收濾波器可以識別所有的11位和29位標識符;驗收濾波器為選擇的標準標識符提供Full CAN-style自動接收。它主要負責將CAN總線上的數據進行處理,然后通過藍牙串口發送到手機,此外,ARM模塊還負責檢測未知CAN總線上的波特率,并發送給手機端。
藍牙串口模塊負責ARM與手機交換數據,其串口的通信速率達到1 382 400bps。電源模塊負責為各個模塊供電。
2 軟件設計
軟件是藍牙CAN分析儀的關鍵。根據硬件系統結構,軟件包括兩個部分,即運行于ARM處理器的波特率檢測以及數據傳輸軟件;運行在智能手機上的CAN分析儀操作界面。對于運行在ARM處理中的軟件,本文著重介紹一種新型的波特率自動檢測方法。
2.1 波特率自動檢測軟件設計
實現CAN總線和CAN分析儀之間的通信,需有相同的波特率,因而波特率的檢測十分重要。當下主流的波特率檢測方法是利用應答機制建立的波特率檢測方法。其開始時通過試聽一些推薦的CAN總線優選波特率,即1Mbit/s,800kbit/s,500kbit/s,250kbit/s,125kbit/s,(100kbit/s),50kbit/s,20kbit/s,10kbit/sHl:若能無故障地接受到完整的CAN消息,說明波特率檢測成功;如果CAN總線的波特率不是優選波特率,則可以通過主機和CAN總線的應答來測定波特率。此種檢測方法速度慢,存在一定誤差且對被測網絡有一定影響。
針對采用應答機制設定的波特率檢測方法的缺點,本文提出了一種新的自動波特率檢測方法。本自動波特率檢測系統巧妙地利用了ARM處理器的中斷端口,將CAN總線上的波形記錄到ARM處理器內,然后對獲得的波形進行分析,得出系統的波特率。其檢測速度快(小于200ms),檢測準確(得出的波特率為一個精確值,而非范圍值),不向被測網絡發送數據,并且成本很低,無須增加任何芯片。
具體實現方法是:硬件方面,將隔離CAN接口的RX引腳接到ARM的定時器捕獲端口。在軟件方面,首先將RX引腳相鄰兩個上跳變和下跳變的間隔周期都記錄下來;其次將周期數據排序,數據應呈階梯狀;然后將數據按階梯分段并求出每個階梯的中位數,第一個階梯為1位數據的持續時間,第二個階梯為2位數據的持續時間……以此類推。由于CAN總線不會連續6位出現相同電平,因此階梯只有5階,且第二個數據等于第一個數據的2倍,第三個數據等于第一個數據的3倍,以此類推。根據這個特性可以校驗數據并調整最終獲得的1位數據的持續時間。最終的波特率即為1位持續時間的倒數。流程圖如圖4所示。
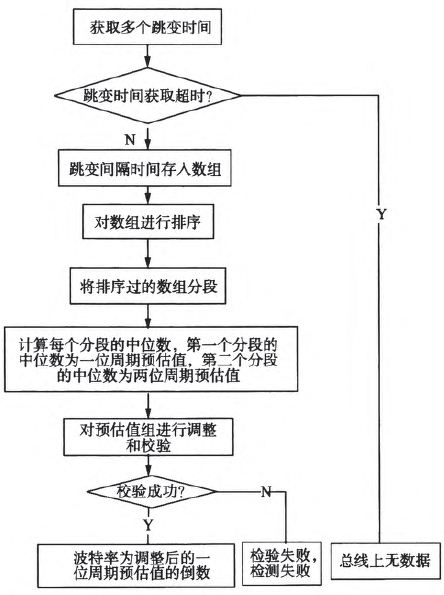
圖4 波特率檢測流程圖










評論