有源RFID局域定位系統設計方案

在多標簽定位系統中必然會出現多個標簽同時與讀寫器通信產生信號碰撞的情況。目前RFID多標簽防碰撞算法有多種:多址技術、ALOHA防碰撞算法、二進制防碰撞算法等。多址防碰撞算法是以增加系統的復雜性和提高成本為代價,且有無法克服的缺陷;ALOHA防碰撞算法有時會導致讀寫器出現錯誤判斷,對某個標簽是否在讀寫范圍內產生誤判,同時還存在沖突概率較大的問題;簡單的二進制防碰撞算法有時并不能夠取得很好的避碰效果。文中采用基于序列號對時隙數運算的排序算法,該算法可以克服上述誤判的問題,并且易于實現、效率高、軟件編寫簡單,可以不受標簽數量的限制,是一種穩定可靠、實用性強的防碰撞算法。RFID定位算法有:LANDMARC、基于信號達到角度的定位法(AOA)等,這里采用圓周定位算法,該方法簡單可靠,易于在線實施,且具有一定定位精度。
本文引用地址:http://www.104case.com/article/260088.htm1 系統結構設計
本系統主要由讀寫器和有源標簽組成。讀寫器與標簽之間的射頻信號通過空間耦合實現無接觸信息傳遞,讀寫器通過與標簽的無線通信,獲得接收信號強度指示(RSSI)值,這是對待定位標簽進行位置計算的重要參數。微控制器PIC16F877A控制CC2500射頻收發模塊的數據發送與接收。讀寫器網關節點可通過RS232接口與上位機相連。系統結構框圖如圖1所示。
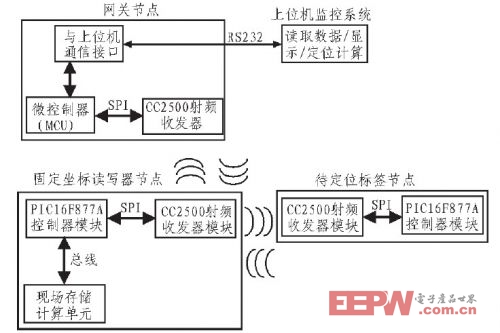
圖1 系統結構框圖
讀寫器與標簽的控制模塊均采用Microchip公司的8位高性能、低功耗微控制器PIC16F877A作為主控芯片,它在架構上采用哈佛總線結構,數據總線和指令總線分離,便于實現全部指令的單字節化,單周期化,從而有利于提高CPU執行指令的速度。此外,片上數據存貯空間比較大,充足的存儲空間,可以方便通信協議棧的設計與實現。內部看門狗定時器,提高了程序執行的穩定性;低功耗休眠模式,大大降低了系統的功耗。它具有驅動能力強、外接電路簡潔、功耗低等特點。因此適合于作為RFID讀寫器的控制器來使用。
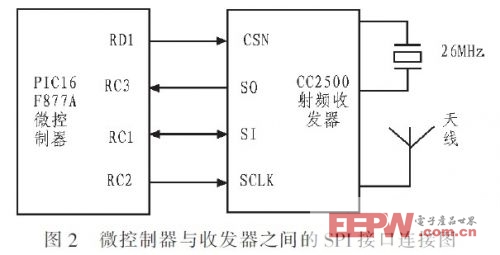
射頻收發器選用CC2500作為控制芯片,CC2500集成了一個數據傳輸可達500 kbps的高度可配置的調制解調器,大大加強了數據傳輸的性能,同時通過開啟集成在調制解調器上的前向誤差校正選項,使性能得到大幅度提升。MCU通過SPI接口向CC2500發送操作命令,配置其調制方式、工作頻率等參數,通過指令將其配置為接收狀態、發送狀態、空閑狀態或休眠狀態。CC2500的引腳SO和SI分別為數據傳輸的輸出和輸入信號線,CSN為片選信號引腳,SCLK為時鐘信號引腳。當其接收到一個數據或發送完一個數據,都會通過引腳GD00和GD02輸出相應的狀態脈沖,MCU據此來判斷CC2500的狀態,從而決定對CC2500的下一步操控。微控制器PIC16F877A和CC2500收發器模塊的連接如圖2所示。
2 多標簽識別防碰撞算法設計
定位系統涉及多個標簽與讀寫器之間的實時通信,需要解決多標簽識別信號碰撞問題。基于序列號對時隙數運算的排序算法具有算法易于實現、響應速度快、執行效率高等特點,是時分復用方法的一種。利用微控制器PIC16F877A通過SPI接口來控制CC2500數據的發送時隙,將標簽作為應答器,基于序列號對時隙數運算的排序算法的實現流程如下:
在爭用周期內,首先利用標簽序列號除以爭用周期時隙數所得的余數來確定標簽在爭用數據幀內的發送時隙;然后利用標簽序列號除以爭用周期時隙數所得的商確定標簽在爭用幀內相應時隙的發送位,然后在爭用周期內發送的爭用數據幀的相應時隙發送位填充數據1;最后利用填充過的爭用數據幀確定標簽在整個數據發送周期內的發送順序(即標簽的發送順序=其發送位及其前面各發送位中1的總數),從而給不同序列號的標簽分配不同的發送時序。本設計用了9個待定位標簽,利用上述算法進行標簽識別排序,具體流程如圖3所示(這里的應答器指標簽應答器)。
圖3倒數第二行為9個標簽的發送時序,發送的時序是A0,A4,A8,A1,A5,A2,A6,A3,A7.這樣這9個標簽就可以保證無碰撞地被讀寫器識別,這種多標簽防碰撞沖突是多標簽定位系統能夠正常工作的前提。

圖3 基于序列號對時隙數運算的排序算法
3 定位算法設計
本系統采用的定位算法是圓周定位法,圓周定位法是利用讀寫器接收標簽信號得到RSSI值,通過相關的定位計算公式來進行定位的一種方法。
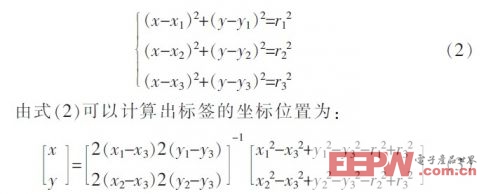
無線信號的接收信號強度和信號傳輸距離的關系可以用式(3)來表示,其中RSSI是接收信號強度,d是收發節點之間的距離,n是信號傳播因子,EAF是環境因子。

由式(1)中可以看出,射頻參數A和n的值決定了接收信號強度和信號傳輸距離的關系。A和n用于描述通信操作環境。射頻參數A被定義為dbm,表示距發射機1 m時接收到信號平均能量的絕對值,如平均接收能量是-10 dbm,那么參數A就被定義為10.射頻參數n指出了信號能量隨著到收發器距離增加而衰減的速率,其數值的大小取決于無線信號傳播的環境。通過大量的比較和驗證,得到實際應用場合環境因子EAF的大概值為13.5,A取45,n取3.5.依據式(1)可得到待定位標簽到讀寫器的直線距離,r表示讀寫器與待定位標簽之間的距離,即r=d.3個讀寫器的位置已知,分別是p1(x1,y1),p2(x2,y2),p3(x3,y3)。則待定位標簽的坐標計算如式(2)所示:
三邊定位的示意圖如圖4和圖5.
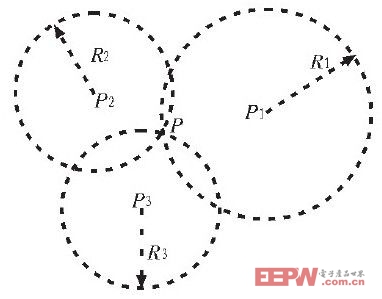
圖4 三邊定位的理想情況
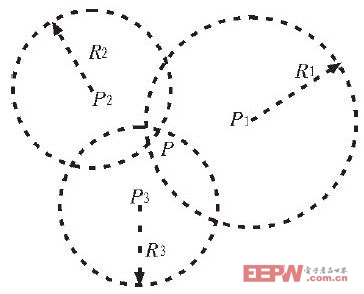
圖5 三邊定位的實際情況
實驗中將3個讀寫器放在坐標為(2,2),(2,4),(4,4)的位置上,分別依次對9個待定位標簽進行定位實驗。9個待定位標簽放在4 mx4 m的正方形區域內,相鄰的待定位標簽相互之間相隔2 m,具體布置如圖6所示。
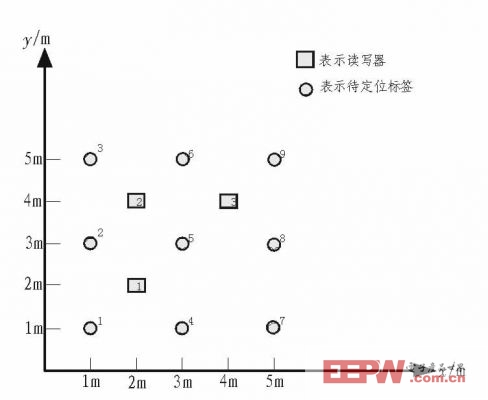
圖6 定位實驗中讀寫器與標簽放置的位置
分別對每個標簽到讀寫器的RSSI值測試20次,并記錄其數據,通過上述圓周定位算法對得到的RSSI值進行處理,得到各個待定位標簽的坐標值,實驗結果如圖7所示。
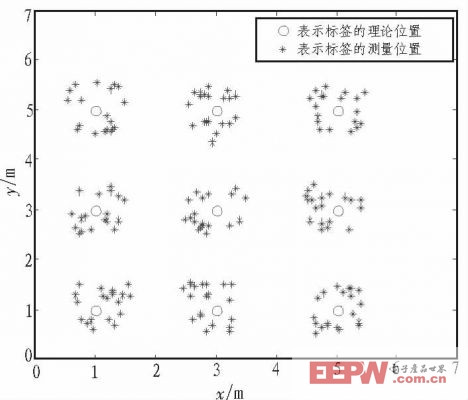
圖7 定位實驗結果圖
圖7中圓圈表示標簽的理論位置,星點表示標簽的定位位置,每一個標簽定位實驗20次。從圖中可以看出每個區域的20個星點都圍繞在圓圈附近,說明定位位置相比于理論位置存在定位誤差。分別對9個標簽點的20次定位測試結果進行均方差統計,均方差的范圍在0.236~0.541之間。
4 結束語
文中介紹了一種基于低功耗微控制器PIC16F877A和收發器CC2500的RFID局域定位系統設計方法,介紹了硬件模塊系統的設計方法;利用基于序列號對時隙數運算的排序算法解決了多標簽識別的防碰撞問題;利用圓周定位算法對待定位標簽進行了局域定位。實驗表明該設計方法及算法能夠在多標簽狀態下完成一定精度的實時定位,驗證了該局域定位方法的可行性。
絕對值編碼器相關文章:絕對值編碼器原理


評論