用單片機pic16f877a實現鼠標數據的采集

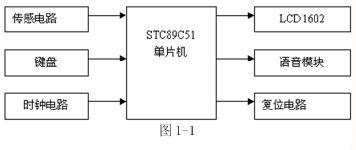
最近弄個用單片機pic16f877a實現鼠標數據的采集。通過對鼠標底層通信原理與協議的分析,以單片機pic16f877a構成鼠標數據的采集的實現和液晶1602顯示的實現。
本文引用地址:http://www.104case.com/article/201610/310912.htm現在繼續寫下去 !!!!!!盡管和比賽沒有關系了
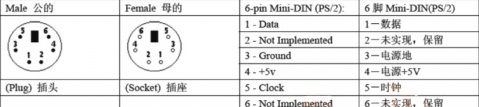
一、先要熟悉鼠標的協議和接口
下面是PS2的接口
:
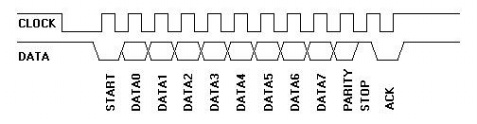
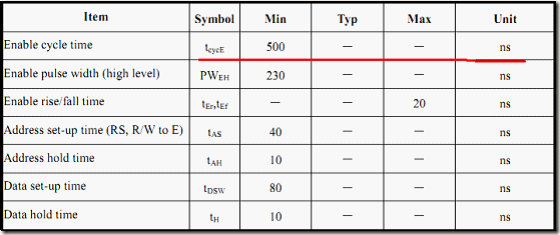
這是鼠標在傳輸過程中數據的一個 幀:
一個開始位:(為0)
八個數據位:
一個奇校驗位:
一個停止位:(它總是1)
鼠標和單片機通信:
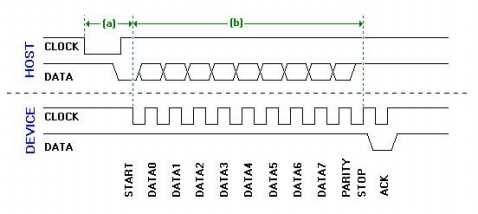
1、單片機給鼠標發命令是按下面的格式進行的:
(注意:一個應答信號的接收)
這是它的詳細過程:
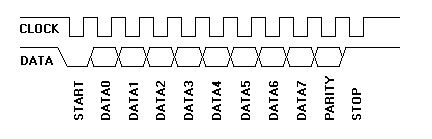
2、鼠標向單片機傳送數據是下面的格式:
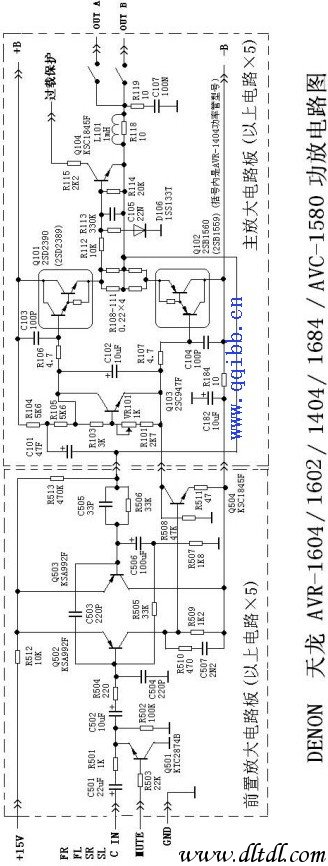
二、下面就是設計鼠標和單片機的通信電路:(可以參考下面這個接法)
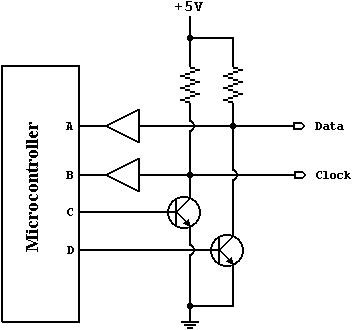
(注意:數據和時鐘都這是集電極開路的結構,平時是高電平 )
三、外圍布置好了就是具體程序的實現
我們可以采用單片機16F877A的外部中斷來響應鼠標的時鐘,在中斷中接收數據。
我 們可按下面的步驟實現:
1)把時鐘線拉低至少100微秒
2)把數據線拉低
3)釋放數據線
4)等待設備把時鐘線拉低
5)設置/復位數據線發送第一個數據位
6)等待設備把時鐘拉高
7)等待設備把時鐘拉低
8)重復5-7步發送剩下的7個數據位和校驗位
9)釋放數據線
10)等待設備把數據線拉低
11)等待設備把時鐘線拉低
12)等待設備釋放數據線和時鐘線
程序如下:
//外部中斷INT0初始化
void INTE_init(void)
{
INTCON=0X00;
GIE=1; //總中斷
RBPU=0;
//INTE=1;//外部中斷
//INTEDG=0;//下升沿觸發有效
INTEDG=1;//上升沿觸發有效
TRISB=0x00;//正常工作下時鐘RB0和數據RB2均輸入
INTF=0;//這三句是開外部中斷
PORTB=0X00;
}
//發送數據
//發送11位數據:1START-8DATA-1PARITY-1STOP
//并接收一個應答位ack = 0
void mouse_write_dat(unsigned char dat)
{
unsigned char i; //循環變量
INTE = 0; //關閉外部中斷
asm( "nop");
mouse_clk = 0; //拉低時鐘線
delay(33); //至少延時100us
mouse_sda = 0; //發送起始位
mouse_clk = 1; //釋放時鐘線
mouse_sda = 1; //釋放數據線
TRISB0=1;//時鐘輸入
asm( "nop");
TRISB=0X01;
for(i = 0; i < 8; i++)
{ //至少要在25us內完成發送一位
while(!mouse_clk); //等待設備把時鐘線拉高
mouse_sda =(bit)(dat& 0x01);//先發送最低位
dat >>= 1; //下降沿寫入數據
while(mouse_clk); //等待設備把時鐘線拉低
}
while(!mouse_clk); //等待設備把時鐘線拉高
mouse_sda = 0; //發送奇校驗位
while(mouse_clk); //等待設備把時鐘線拉低
while(!mouse_clk); //等待設備把時鐘線拉高
mouse_sda = 1; //發送停止位
while(mouse_clk); //等待設備把時鐘線拉低
TRISB2=1;//數據輸入
asm( "nop");
asm( "nop");
while(!mouse_clk); //等待設備把時鐘線拉高
while(mouse_sda); //等待接收應答位(總是為0)
while(mouse_clk); //等待設備把時鐘線拉低
while(!mouse_clk); //等待設備釋放時鐘線
while(!mouse_sda); //等待設備釋放數據線
INTE = 1; //打開外部中斷INTE
}
再就是鼠標的發數據模塊可以參考下面的步驟:
1)等待時鐘線為高
2)數據線仍然為低嗎 有錯誤發生放棄
3)讀入8個數據位在讀入這些位后
4)讀入校驗位>測試時鐘線數否被主機拉低
5)讀入停止位/這就意味著放棄這次傳送
6)數據線仍舊為0嗎
是保持時鐘直到數據1然后產生一個錯誤
7)輸出應答位
8)檢查校驗位
如果校驗位不正確則產生一個錯誤
9)延遲45微秒給主機時間抑制下次的傳送
按如下次序讀取每位8個數據位檢驗位和停止位
1)延遲20微秒
2)把時鐘拉低
3)延遲40微秒
4)釋放時鐘
5)延遲20微秒
7)讀數據線
按如下次序發送應答位
1)延遲15微秒
2)把數據線拉低
3)延遲5微秒
4)把時鐘線拉低
5)延遲40微秒
6)釋放時鐘線
7)延遲5微秒
8)釋放數據線
void interrupt INTE_ISR(void)
{
mouse_word >>= 1; //先向右空移一位
if(mouse_sda) {mouse_word |= 0x0400; } //11位數據先接收最低位0000 010 (0 0000 000) 0 1START-8DATA-1PARITY-1STOP
n++; if(n == 11) {mouse_read_dat(); n = 0;} //接收完成則讀出數據
INTF=0;
}
接下來就是讀鼠標的數據了,首先要明白這個數據包中具體是些什么,看下面的圖:

(一般的鼠標就這些,具體的就要查鼠標的資料了)同志們 還不清楚就看下面的解釋吧!!!
鼠標內部有一個位移計數器,位移計數器是一個9位2的補碼整數。它的最高位作為
符號位出現在位移數據包的第一個字節里。這些計數器在鼠標讀取輸入發現有位移
時被更新。這些值是自從最后一次發送位移數據包給主機后位移的累計量(即最后
一次包發給主機后位移計數器被復位)。位移計數器可表示的值的范圍是-255到+255,
如果超過了范圍,相應的溢出位就被設置,并且在復位前,計數器不會增減。正如我前
面提及的一旦位移數據包成功地發送給主機,位移計數器就會復位,同樣鼠標在收到主機
不是Resend 0xFE命令外的其他命令,計數器也會復位。







評論