筆記本電腦借助通用GPS RF前端實現軟件基帶處理

只要判定變量超過一定的門限,系統就以為成功地實現了捕捉,繼而進進跟蹤模式。否則,就通過調節本地PRN序列的相對相位和振蕩器頻率,來更新判定變量,并重復上述過程。
串行搜索方法的簡單邏輯結構使它非常適適用ASIC實現,而用軟件實現就不切實際了,由于搜索空間非常大。假設系統答應500Hz的載波頻率偏移,多普勒頻率是10kHz,軟件實現需要的搜索空間大概為
另外一種更簡單的軟件捕捉方法叫做頻域并行代碼相位捕捉。這種方法將多普勒頻率和代碼相位搜索合并起來,在經過PRN碼的快速傅立葉變換(FFT)后,將所有代碼相位信息轉換到頻域內。這樣我們只需要搜索多普勒頻移上的空間即可,因此這是一種快速高效的軟件搜索方法。
首先,將輸進信號與本地正弦和余弦載波(同向I和正交Q信號分量)分別相乘。然后把I和Q分量合并成一個復合信號輸進到FFT模塊。傅立葉變換的結果再和 PRN碼的FFT變換結果相乘(PRN天生器產生代碼相位為零的代碼)。實際上,FFT運算和PRN碼的產生可以采用列表的方法,以降低運算的復雜性。
最后,輸進信號與本地代碼的乘積(該乘積代表了輸進信號和載波頻率的相關性)被送到傅立葉逆變換模塊,該模塊的自乘輸出結果再被反饋到判定邏輯。基于 FFT的頻域計算被證實具有較小的運算量。例如之條件到的那個例子, 捕捉運算的復雜性大概為20,000/500 = 40次FFT運算操縱。
串行搜索方法具有簡單的邏輯和控制架構,非常適合ASIC實現。然而,巨大的搜索空間增加了軟件算法的復雜性。所以對于軟件GPS接收機來說,串行搜索方 法并不是一個好的選擇。相反,并行代碼捕捉方法的低復雜性使它很適適用軟件實現。然而,它的邏輯架構遠比串行搜索方法復雜,因此很難用ASIC實現。
跟蹤細調
捕捉過程建立了對GPS信號的頻率和代碼相位參數的粗校準。因此,跟蹤的目的是進行細調,以便系統能用精確的代碼相位和頻率信息解調出數據。跟蹤包括代碼相位跟蹤和載波頻率跟蹤。
代碼跟蹤用延時鎖相環(DLL)實現,如圖2所示。DLL電路把輸進信號乘以PRN碼的三個復制碼(間隔±0.5碼片),這三個復制碼分別代表和輸進信號相比提前、準時和落后到達。經過綜合后,這些信號分別代表輸進信號和本地復制碼之間的相關性。具有最高相關值的信號被選中保存下來(圖3)。
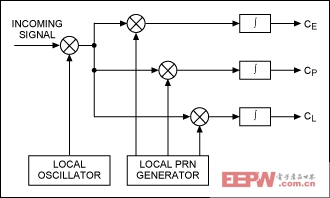
圖2. 使用延時鎖相環作代碼跟蹤幫助細調,以便系統能用精確的代碼相位和頻率信息解調出數據。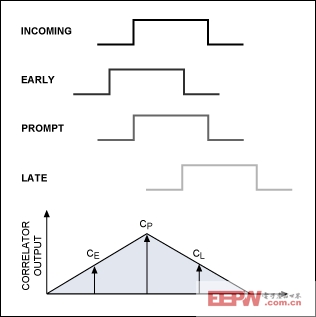
圖3. DLL電路把輸進信號乘以PRN碼的三個復制碼(間隔±0.5碼),這三個復制碼分別代表和輸進信號相比提前、準時和落后到達。具有最高相關值的信號被選中保存下來。

波段開關相關文章:波段開關原理




評論