大型貨車超載超速實時檢測系統

第三章 系統總體設計
3.1 系統功能及配置
3.1.1 系統功能描述
本系統以嵌入式微處理器ARM9為硬件核心[14],應用無線通信網技術和以太網技術,通過移植嵌入式、操作系統Linux,實現一個便攜式大貨車超載超速實時監控系統。該系統通過實時采集貨車的重量、傾角與速度,用CAN總線與系統中心聯系,經過系統處理分析得出結果,并將貨車重量和速度的信息實時的顯示在駕駛室的顯示器上。當貨車超重或超速時,向駕駛室發出警告,警告無效時,通過GPRS無線網絡將分析結果傳送到交管中心,作為處罰與管理的依據。系統總體結構如圖3.1:
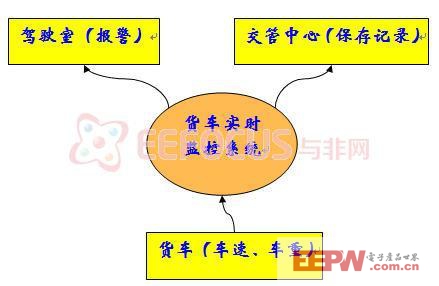
圖3.1 系統總體結構
3.1.2 系統配置
根據系統功能以及設計嵌入式系統的要求,開發此系統需要以下主要配置:
(1)開發環境:LinuxMint-8 +ARM Linux系統
(2)開發語言:C /C++語言
(3)硬件基礎:北京博創公司UP-NETARM2410-S開發板上大部分硬件,包括三星S3C2410核心板,64M NAND FLASH,TFT液晶LCD,等;另外還有凌陽SPACE061A;HX711測重專用芯片;霍爾開關件AH44E;GPRS模塊。
3.2 系統結構
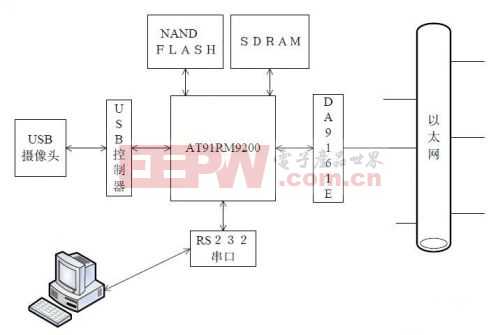
本系統是以北京博創公司的UP-NETARM2410-S實驗開發板為中心,附加外部測速模塊、測重模塊、GPRS發送模塊和存儲模塊等構成系統整體。由S3C2410 ARM CPU控制整個系統工作[15],整體結構如圖3.2:
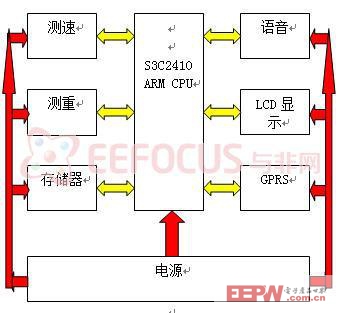
圖3.2 系統結構
3.2.1 系統硬件結構
(1)硬件結構
硬件組成主要包含兩部分,一是開發平臺的硬件系統,二是擴展硬件系統。
結構如圖3.2所示,開發板平臺上使用的是核心板、LCD、音頻、電源和各種接口;擴展硬件系統包含了主要功能模塊有速度測量模塊、重量測量模塊、傾斜角度測量和GPRS模塊。
(2)主要硬件介紹
① 測重模塊,使用壓力傳感器采集重力信號,使用HX711壓力傳感器24位高精度專用芯片對采集的信號進行處理[16]。經過HX711處理后直接得到數字信號[17],將四路信號傳輸至SPACE061A,經過換算處理后得到精確的貨車質量,再傳輸到S3C2410 ARM。
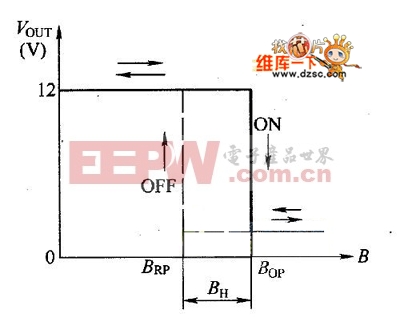
② 測速模塊,在與傳動軸相連的轉盤上放置四個磁鋼,當磁鋼經過霍爾開關時,霍爾開關產生一個負脈沖。將AH44E的輸出端連接到SPACE061A的IOB3(外部中斷2輸入口),利用中斷技術由SPACE061A對脈沖進行計數,并同時計時,通過SPACE061A的處理得到精確的速度值,再通過總線將速度傳輸到S3C2410 ARM CPU[18]。
③顯示模塊,采集S3C2410自帶的LED顯示器,將速度和重量顯示出來,用以提示駕駛員。
④語音處理模塊,該模塊也采用S3C2410、凌陽SPACE061A開發板自帶的,S3C2410和凌陽SPACE061A有強大的語音處理功能,聲音模塊也是用于提醒駕駛員,以達到減少交通事故的目的。
⑤總線模塊,這里采用CAN(Controller Area Network)總線,CAN總線在汽車上使用比較廣泛。CAN總線是一種現場總線,具有穩定可靠,連線簡單(就兩根線),組網消費低,速度比串口快,能長距離傳輸等特點。
⑥GPRS模塊,使用博創的SIM300_v7.03自行開發完成,可以實現電話、短信、上網的功能,通過UART接口與ARM9通信。
稱重傳感器相關文章:稱重傳感器原理 傾角傳感器相關文章:傾角傳感器原理

評論