大型貨車超載超速實時檢測系統(tǒng)

4.2.2軟件設(shè)計
軟件采用C語言程序,定時采用低頻定時器,用2Hz時基定時,定時周期為1s(定時時長0.5s),同時要用外部中斷2對OUT脈計數(shù)。使用一個標(biāo)志(signal)顯示計時長度(第幾個0.5s)。當(dāng)signal為1時,啟動外部中斷計數(shù);當(dāng)signal為3時,關(guān)閉外部中斷,同時關(guān)閉定時中斷,完成一次計數(shù)[30]。
(1)函數(shù)流程圖分析
測速度模塊主要由三個子函數(shù)組成:測速主函,定時中斷子函數(shù),外部中斷子函數(shù)。
數(shù)測速函數(shù)是測速模塊的主體,是主函數(shù)直接調(diào)用的子函數(shù),流程圖如圖4.3所示。
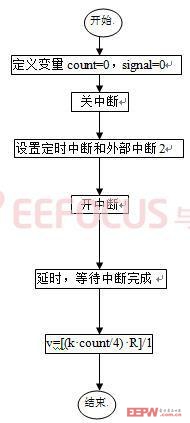
圖4.6 測速函數(shù)流程圖
定時子程序是用于給定準(zhǔn)確的時間,以便能夠計算出精準(zhǔn)的速度,定時使用2Hz低頻時基計時。定時中斷子函數(shù)流程圖如圖4.4所示。
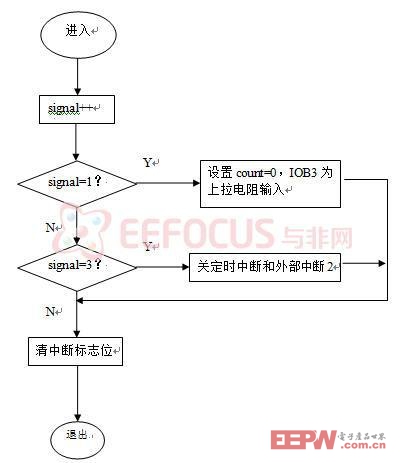
圖4.7 定時中斷子函數(shù)流程圖
為了能夠及時的計下AH44E產(chǎn)生的每個負(fù)脈沖,必須采用外部中斷計數(shù)。外部中斷子函數(shù)流程圖如圖4.5所示。
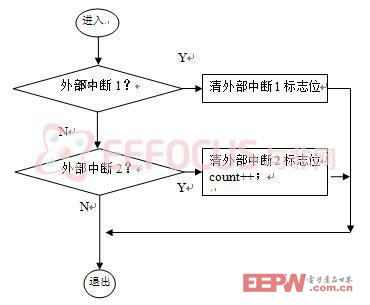
圖4.8 外部中斷子函數(shù)流程圖
(2)部分程序代碼
unsigned int signal=0; //計時標(biāo)志
unsigned int count=0; //計外部脈沖數(shù)
double speed(void)
{
unsigned int uiDelay=0xffff;
__asm(INT OFF); //關(guān)閉中斷
*P_INT_Ctrl=C_IRQ3_EXT2 | C_IRQ5_2Hz;
//設(shè)置中斷 IRQ3_EXT1、IRQ5_2Hz
__asm(INT IRQ); //開中斷
while(uiDelay--)
*P_Watchdog_Clear = C_WDTCLR; //延時等待
uiDelay=0xffff;
while(uiDelay--)
*P_Watchdog_Clear = C_WDTCLR; //延時等待
return (double)count/(signal-1)*2; //計算速度
}
//中斷服務(wù)子程序代碼如下:
void IRQ5(void)
{
if(*P_INT_Ctrl0x0004)
{
signal++;
if(signal==1)
{
count=0; //signal=1時計數(shù)開始
*P_IOB_Dir=0x00; //設(shè)IOB3為上拉電阻輸入
*P_IOB_Attrib=0x00;
*P_IOB_Data=0x08;
}
else if(signal==3)
//signal=3時計數(shù)結(jié)束
(*P_INT_Ctrl)=~(C_IRQ3_EXT2 | C_IRQ5_2Hz);
//關(guān)IRQ3_EXT1、IRQ5_2Hz中斷
*P_INT_Clear=C_IRQ5_2Hz; //清中斷標(biāo)志位
}
else
{
*P_INT_Clear=0x0008; //清中斷標(biāo)志位
}
}
void IRQ3(void)
{
if(*P_INT_CtrlC_IRQ3_EXT1) //外部中斷1
{
*P_INT_Clear=C_IRQ3_EXT1; //清中斷標(biāo)志位
}
else if(*P_INT_CtrlC_IRQ3_EXT2) //外部中斷2
{
count++; //計數(shù)加1
*P_INT_Clear=C_IRQ3_EXT2; //清中斷標(biāo)志位
}
}

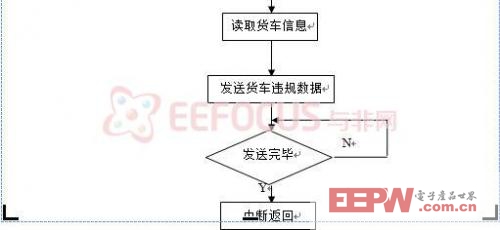
圖4.9 GPRS程序流程圖
稱重傳感器相關(guān)文章:稱重傳感器原理 傾角傳感器相關(guān)文章:傾角傳感器原理

評論