采用MEMS麥克風(fēng)實現(xiàn)復(fù)雜環(huán)境下對特定語音的提取與放大

4.1. 硬件設(shè)計
本系統(tǒng)使用組合麥克風(fēng)得到語音信號[9]。系統(tǒng)將使用6個背靠背的ADMP421并使用隔音效果比較好的墊片將它們隔離,這樣就可以構(gòu)成簡單的差動結(jié)構(gòu),差動輸出的信號就可以簡單的消除來自不同方向的噪聲干擾。
4.2. 相位調(diào)制
由于聲音信號是有一個比較寬的頻率范圍,大致在300Hz-3400Hz[10],雖然ADMP421體積較小,但是它們收到的聲音信號相互之間還是存在著相位差的。例如,兩個麥克風(fēng)之間相距0.5cm,由于聲音的傳播速度是340m/s(室溫下),那么其傳播時間相差即為14.7微秒,其相對應(yīng)的頻率即為68K Hz。那么頻率為17K Hz的信號就會因為相差90°的相位,而不能由差分的信號消除。而在別的頻率的信號也會由于相位差的原因而出現(xiàn)不同的相減差別。在相位接近180°的情況下,甚至?xí)霈F(xiàn)噪聲增強的現(xiàn)象。
所以,在本系統(tǒng)中,首先要進行距離匹配,使各路信號基本實現(xiàn)相位之間的匹配。下面給出兩個具體的方案:①采用頻域的分析方法,將語音信號解析,然后根據(jù)麥克風(fēng)之間的距離計算相位差,之后補償。②在數(shù)據(jù)流中加入數(shù)字濾波器,使濾波器的相頻相應(yīng)恰恰可以補償相位差。前者較為精細,處理效果好,但是要耗費大量的系統(tǒng)資源;后者是較為通用的方案,雖然不能實現(xiàn)完全的匹配,但是效果還是可以接受的。
4.3用戶特色語音設(shè)定
由用戶預(yù)先在較為安靜的環(huán)境中進行麥克風(fēng)測試。用戶對著主麥克風(fēng)說話,然后由內(nèi)部的匹配算法,將各個方向的麥克風(fēng)的信號收集然后根據(jù)用戶的語音信息進行合理的配置,盡量增大各個麥克風(fēng)的該用戶的語音特征音量輸出。
之后,在噪聲環(huán)境中,用戶可以選擇相應(yīng)的配置,增大用戶的特征音量,減小環(huán)境噪聲。如果噪聲的頻率特性較用戶語音的差別較大,這種方法就比較有效。
4.4其他語音濾波算法的應(yīng)用
隨著DSP(數(shù)字信號處理)技術(shù)的發(fā)展和在各種應(yīng)用中的深入,數(shù)字信號處理算法的研究是當(dāng)前的一個熱點。其中自適應(yīng)濾波算法以其卓越的自學(xué)習(xí)和自跟蹤性能在以上的產(chǎn)品中得到廣泛的應(yīng)用,也是本文要研究的方向。自適應(yīng)濾波的基本理論通過幾十年的發(fā)展己日趨成熟,近十幾年來自適應(yīng)濾波器的研究主要針對算法與硬件實現(xiàn)。算法研究主要是對算法速度和精度的改進,其方法大都采用軟件C、MATLAB等仿真軟件對算法的建模和修正[11]。
自適應(yīng)濾波算法有以下幾種常見的實現(xiàn)方式:RLS算法,SIGN一ERROE一LMS算法,LMS算法,NLMS算法。而本系統(tǒng)可以根據(jù)不同的噪聲背景選擇,不同的消噪模式。
5.設(shè)計流程
SOC設(shè)計一般采用經(jīng)典的自頂向下的設(shè)計流程。它開始于規(guī)范制定、功能劃分,結(jié)束于系統(tǒng)集成和驗證。主要包括以下步驟:① 為系統(tǒng)和子系統(tǒng)制定全面的設(shè)計規(guī)范。② 精簡設(shè)計中的結(jié)構(gòu)和算法。如果必要的話,包括軟件設(shè)計和軟硬件協(xié)同仿真。③ 把芯片功能劃分為定義好了的核。④ 設(shè)計或者選擇合適的核。⑤ 把核進行集成,進行功能驗證和時序驗證。⑥ 把子系統(tǒng)或系統(tǒng)提交給下一級更高層次的集成,如果是最頂層,則可以Tapeout(投片)⑦ 驗證設(shè)計的所有方面(功能、時序等等)。
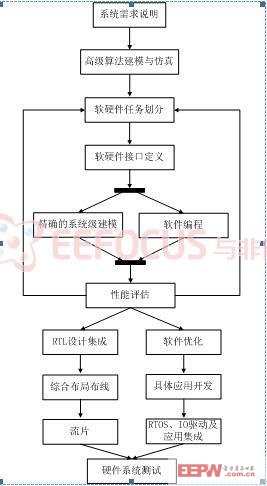
圖 4 SOC設(shè)計流程
本系統(tǒng)做為SOPC設(shè)計方法的獨特之處在于:1.高級算法建模,可以利用matlab仿真之后,使用DSPbuilder將算法生成為VHDL的硬件描述語言代碼,直接在FPGA中生成電路,驗證算法。相對于仿真模擬,可靠性進一步增加。2.由于采用SOPC的設(shè)計方案,在整個系統(tǒng)設(shè)計完成后,可以利用FPGA直接做成板級產(chǎn)品,投入市場。現(xiàn)在的低端FPGA的成本已經(jīng)下降很多,對于本應(yīng)用的規(guī)模電路設(shè)計,其完全可以滿足需求。待市場明細后,可快速生成SOC方案,進一步降低成本,降低投資風(fēng)險。













評論