精度位置控制應用中運用NanoPWM驅動器代替線性驅動器

靜止誤差—NanoPWMvs線性驅動器
測試結果在表6中,總結在表格3中

表6 –NanoPWM(紅色)VS線性驅動器(黃色)靜止抖動
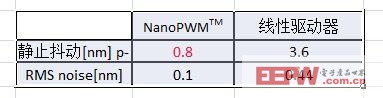
Table 3 - NanoPWM (紅色) VS 線性驅動器 (黃色) 靜止抖動
使用NanoPWM驅動器比使用線性驅動器時的靜止抖動明顯減小(小4.5倍:0.8nmVr3.6nm)
低速跟隨誤差-NanoPWM VS線性驅動器.
跟隨誤差是在1mm/s的速度下測量的,測試結果在表圖7中,總結在表格4中

圖7 NanoPWM驅動器(紅色)VS線性驅動器(黃色)的跟隨誤差
NanoPWM 線性驅動器

Table 4 - NanoPWM (紅) VS線性驅動器 (黃) 跟隨誤差
使用NanoPWM驅動器時跟隨誤差明顯減小,結果得到跟平滑的運動軌跡,這樣的軌跡在晶圓檢測過程中十分重要。
靜止誤差-NanoPWM VS標準PWM驅動器
測試結果見圖8,表5進行了總結

圖8-NanoPWM(紅色)vs PWM(黃色)靜止抖動
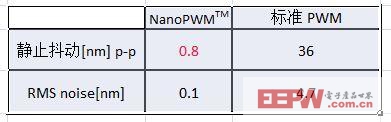
Table 5 - NanoPWM (紅色) VS PWM drive (黃色) 靜止抖動
使用NanoPWM驅動器的靜止誤差比使用標準PWM驅動器小兩個數量級。平板顯示器加工系統比較龐大,對于馬達電壓和電流的要求超過了目前商業化了的線性馬達的容許能力。有機LED顯示要求更高的精確度,跟隨精度和靜止抖動,都要在幾個納米的誤差范圍內。NanoPWM給這樣的需求提出了解決方案。
總結
本文介紹了一直新型的線性開關伺服驅動器-NanoPWM,這種驅動器具有線性驅動器和PWM驅動器的所有優點。使用NanoPWM驅動器得到的運動性能超過了目前已經商業化了的線性伺服驅動器的性能。這種驅動器更小,更可靠,更便宜。
這種驅動器可以滿足更高的運動性能需求,適合半導體晶圓檢測和平板顯示器制造系統。

pwm相關文章:pwm原理



評論