精度位置控制應(yīng)用中運(yùn)用NanoPWM驅(qū)動(dòng)器代替線性驅(qū)動(dòng)器

需求

表3-半導(dǎo)體晶圓藍(lán)圖
半導(dǎo)體晶圓檢測系統(tǒng)要求亞納米級(jí)的靜止誤差和納米級(jí)跟隨誤差。今天,大多數(shù)系統(tǒng)是為了處理直徑300mm 的晶圓。下一代晶圓的直徑將達(dá)到450mm。這要求有同樣或者更好的位置控制性能,由于尺寸和重量更大,我們需要更大的馬達(dá)和驅(qū)動(dòng)器來保持和提高系統(tǒng)的吞吐量。這樣的系統(tǒng)要求驅(qū)動(dòng)器具有線性驅(qū)動(dòng)器和PWM驅(qū)動(dòng)的優(yōu)點(diǎn)。NanoPWMTM就是這樣的驅(qū)動(dòng)器。它很高效,可以實(shí)現(xiàn)高電壓操作,提供高電流。它很緊湊而且成本更低。
圖4和5介紹了NaonPWM的主要特點(diǎn)。

lowEM noise :低電磁噪聲
good performance:良好的性能
High efficiency:高效率
Compact size:結(jié)構(gòu)緊湊
Very reliable:非常可靠
Affordable price:可接受的價(jià)位
Regular performance:一般性能
High EM noise :高電磁噪聲
Complex design:設(shè)計(jì)復(fù)雜
Poor reliability :可靠性較差
Low efficiency:效率低
Expensive:造價(jià)高
圖4-NanoPWM兼容了線性驅(qū)動(dòng)器和PWM驅(qū)動(dòng)器的優(yōu)點(diǎn)

圖5-相同功率的線性驅(qū)動(dòng)器和PWM驅(qū)動(dòng)器的尺寸對比
性能比較
測試系統(tǒng)包括一個(gè)無貼心直線馬達(dá)帶動(dòng)的直線平臺(tái),交叉滾珠軸承機(jī)械和基本分辨率為0.4mico-meter的magnascale激光模擬量SIN-COS編碼器。運(yùn)動(dòng)控制系統(tǒng)包括ACS MC4U控制模塊和三種不同的驅(qū)動(dòng)器
• NanoPWM
• Standard PWM標(biāo)準(zhǔn)PWM驅(qū)動(dòng)器
• Standalone linear drive單獨(dú)線性驅(qū)動(dòng)器
在每個(gè)測試中,驅(qū)動(dòng)器和算法都進(jìn)行一定的調(diào)試使其達(dá)到最優(yōu)性能和相似的帶寬。
入表2中描述,驅(qū)動(dòng)器具有相同的特性
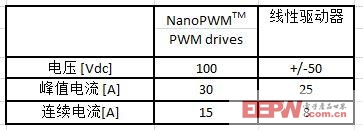
Table 2 – 驅(qū)動(dòng)器的主要性能指標(biāo)
測試以下性能指標(biāo):
靜止抖動(dòng)
低速跟隨誤差

pwm相關(guān)文章:pwm原理



評(píng)論