基于DSP的高精度伺服位置環設計方案

系統軟件設計
按任務劃分,系統軟件由任務與任務管理模塊構成,任務管理模塊對人機接口、控制算法、加減速控制、故障處理等四個任務進行調度管理。控制算法主要包括:調節器控制算法、矢量控制算法和數字濾波器算法等。
按照結構化程序設計方法,遵循“功能獨立”的原則,將系統軟件劃分為主程序模塊和矢量控制程序模塊兩大部分,各部分又劃分為若干子模塊,以利于軟件設計、調試、修改和維護。矢量控制軟件設計采用典型的前后臺模式,以主程序作為后臺任務,中斷服務程序作為前臺任務。根據矢量控制算法的特點,中斷服務程序只處理實時性高的PWM控制子程序,把系統的一些測量、鍵盤處理和顯示等一系列實時性不高的任務放到后臺任務。
主程序是軟件的主體框架,其工作過程是:系統上電復位后,依次對片內外設進行初始化、從E2PROM中讀出控制參數、LED顯示初始信息。初始化完成后,主程序循環執行LED顯示、鍵盤處理和參數計算與保存。
PWM中斷服務。在PWM中斷到來時,首先讀取編碼信號,進行角度和速度計算,接著進行A/D采樣并執行clark和park變換,然后進行PI調節、反park變換,最后進入空間矢量模塊,產生PWM信號。
控制器算法
系統采用三環控制結構,電流環、速度環采用PI控制,位置環采用比例加前饋補償控制。
PID控制算法
PID控制算法是控制中最常用的算法,對于大多數的控制對象采用PID控制均能達到滿意的效果。為防止PID調節器出現過飽和,系統采用帶退飽和的PID控制器,如圖2所示。

離散PID控制算法如下:
式中, 為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時間常數,Td為PID控制的微分時間常數,Kc為退飽和時間常數。
為飽和前的輸出,KP為PID控制的比例增益,Ti為PID控制的積分時間常數,Td為PID控制的微分時間常數,Kc為退飽和時間常數。
位置控制器的控制算法
位置控制器采用比例加前饋控制結構,如圖3所示,其中Gm為電機的傳遞函數,Gspd為速度環的傳遞函數,Gpos為位置環的傳遞函數,Fpos為位置前饋控制器傳遞函數。
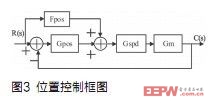
系統的傳遞函數為:

當Fpos(s)=1/(Gspd(s)Gm(s))時,H(s)=1,則可使輸出完全復現輸入信號,且系統的暫態和穩態誤差都為零。其中當速度調節器采用PI控制時,在位置環的截止頻率遠小于速度環的截止頻率時,速度環可等效為一個慣性環節,電機可等效為一個積分環節,于是Fpos(s)可以看成加速度前饋和速度前饋兩部分[5],其中:位置前饋中加速度項差分方程:

式中R(k)為第K個采樣周期中的位置給定信號;Yaf為第K個采樣周期中加速度信號的輸出,Kaf為加速度前饋比例系數。
位置前饋中速度項差分方程:

式中R(k)為第K個采樣周期中的位置給定信號;Yaf為第K個采樣周期中速度信號的輸出,Ksf為速度前饋比例系數。
相應的位置環P的差分方程:

式中R(k)為第K個采樣周期中的位置給定信號;C(k)為第K個采樣周期中的位置反饋信號,Ye為第K個采樣周期中位置環信號的輸出,Kc為位置環比例系數。
絕對式編碼器通信程序
絕對式編碼器與DSP的接口采用CPLD作為接口芯片。CPLD的程序采用VHDL語言編寫,程序結構如圖4所示。此電路完成串行輸入數據到并行輸出數據的轉換,以及并行輸入數據到串行輸出數據的轉換。

圖4中,模塊DIV為時鐘分頻器,TX模塊接收來自微處理器接口模塊MP的8位并行數據,并通過端口DOUT將數據串行輸出到RS-485端口。反過來,RX模塊接收串行數據輸入,并以8位并行格式發送至MP模塊,MP模塊同時將接收到的位置信號轉成脈沖形式輸出,實現與CNC的連接。

伺服電機相關文章:伺服電機工作原理










評論