基于單片機和DSP的被動聲目標探測平臺設計方案

2.3 系統控制模塊
系統控制模塊主要由MSP430單片機來實現。MSP430系列是一個16bit、具有精簡指令集、超低功耗的混合型單片機,適于電池應用的場合或手持設備。筆者采用MSP430F149芯片,它集成的外設有:8通道12bit ADC,2個具有3個捕獲/比較寄存器的16bit定時器、2通道串行通信接口(軟件選擇UART/SPI模式)等。基于MSP430單片機的具體外設資源,筆者設計了相應的系統控制模塊硬件平臺,原理框圖見圖4。

在上述的硬件平臺中,MSP430單片機可以通過串行通信接口中的SPI模式和信號處理模塊進行高速通信;可以通過串行通信接口0中的USART模式和PC機進行通信;可以通過串行通信接口1中的USART模式和姿態傳感器TCM2進行通信,實時獲取平臺本身的姿態信息。另外筆者還把MSP430單片機的8通道ADC和2個16bit定時器全部外接出來,利用這些資源可以實現多種控制功能,比如可以實現信號采集模塊的輸入信號的前置調理和控制(以滿足AD采樣的要求),傳統的前置通道設計一般是模擬的或固定的,利用筆者所設計的平臺,可以很方便地實現全數字化的前置通道控制(如程控濾波器和數字AGC等)。
基于所設計的硬件,開發出了相應的驅動模塊,完成了MSP430單片機和信號處理模塊的SPI通信程序、與PC進行串口通信程序和獲取TCM2姿態信息的串口通信程序等。
2.4 電源模塊
本模塊主要由TPS73HD3XX系列雙電壓調整器和一些附加電路組成。具體的電路原理框圖如圖5所示。
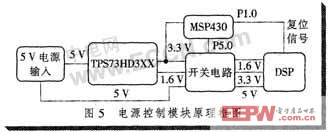
從THS73HD3XX電壓調整器出來的1.6 V和3.3V電壓經過由MSP430單片機P5.0口控制的開關電路再提供給DSP供電,而DSP的復位信號與MSP430單片機P1.0口相連。這種設計可以很方便地實現系統的電源控制,系統的功耗可以有效地進行控制,因為整個系統的功耗主要在DSP上,MSP430單片機的功耗很低,在不需要DSP工作的時候,可以適時地讓其掉電,需要的時候再進行上電和復位。
3 系統調試和外場試驗結果
在上述硬件模塊及相應軟件的基礎上,對整個系統進行了調試。在已完成的平臺上實現了自適應參量模型法定向定位算法,進行了消聲室模擬縮比定向試驗,俯仰角引起的距離相對誤差為±3.8%,方位角引起的距離相對誤差為±0.88%,算法的精度和處理的實時性達到了滿意的結果。定向定位散布界面示意圖如圖6所示。

4 結束語
筆者完成了通用被動聲目標探測平臺的設計,其具有強大的外設擴展功能、電源控制,系統的平均功耗可控制到毫安級。由于采用高集成度的器件,電路板尺寸較小,為94mm×140mm,能滿足實際運用的要求。接口驅動軟件為應用系統設計提供了便利。整個軟硬件平臺通過了外場的實際測試,能滿足系統設計的要求。












評論