基于華邦W90P710處理器的Linux內核應用及串口驅動的實現

嵌入式Linux是一種很受歡迎的操作系統,具有開放源碼、不存在黑箱技術、內核小、功能強大、運行穩定、效率高、易于定制裁減等特點[1],廣泛應用于工控產品。很多工控產品需要和外部設備進行信息交換,而串口通信是最簡單快捷的實現方法。在不同的工控產品中,由于對所選用的串口元件或者串口通信的數據格式、波特率等有不同的需求,需要對串口驅動進行開發。華邦W90P710采用ARM的ARM7TDMI微處理器核心,采用?滋CLinux-2.4.20內核,支持4組通用異步接收發送口(UART),下面基于華邦W90P710的串口驅動詳細分析串口驅動的實現方法,實現嵌入式設備通過串口對外通信。
1 華邦W90P710 UART介紹
華邦W90P710支持4組UART,串口的控制主要通過以下寄存器實現[2]:
(1)行寄存器(UART_LCR):設置數據位長度、奇偶校驗、停止位數。
(2)波特率除數寄存器(UART_DLL、UART_DLM):波特率發生器的公式為:BaudOut=crystal clock/16×[Divisor +2],Divisor為當前波特率。
(3)Modem控制寄存器(UART_MCR):控制RTS、CTS等信號。
(4)FIFO控制寄存器(UART_FCR):設置FIFO的長度,復位FIFO等控制。
(5)接收超時寄存器(UART_TOR):收到首個字節后接收器啟動本超時,之后每收到一個字節后都會重置該值,在此超時時間內不再收到數據時,接收器會產生一個接收中斷。
(6)中斷控制器(UART_IER):設置接收、發送、行中斷等。
在使用RXDn、TXDn前必須對GPIO進行配置,使能RXDn、TXDn,串口才可正常運行。GPIO配置對應表如表1所示。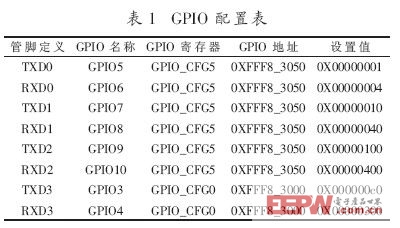
2 Linux系統驅動介紹
設備驅動程序是操作系統內核和機器硬件之間的接口。設備驅動程序為應用程序屏蔽了硬件的細節,這樣在應用程序看來,硬件設備只是一個設備文件,應用程序可以像操作普通文件一樣對硬件設備進行操作。同時,設備驅動程序是內核的一部分[3]。圖1所示為設備驅動程序接口流程圖。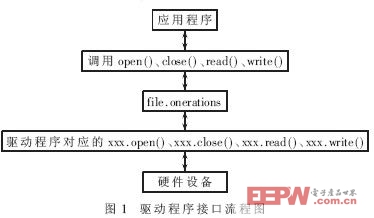
Linux系統的設備分為字符設備、塊設備和網絡設備三種。字符設備是指存取時沒有緩存的設備,只能順序讀寫。典型的字符設備包括鼠標、鍵盤、串行口等;塊設備一般都有緩存來支持,并且塊設備必須能夠支持隨機存取。塊設備主要包括硬盤設備、CD-ROM等;網絡設備在Linux系統中用做專門的處理,Linux的網絡系統主要是基于BSD Unix的socket機制[4]。
3 串口驅動程序詳細介紹
一般來說,Linux的設備驅動程序包括驅動程序的注冊和注銷、設備的打開和釋放、設備的讀寫操作、設備的控制操作、設備的中斷和輪詢處理等功能。下面就這些功能對串口驅動進行詳細說明。
(1)串口設備的數據結構包括串口參數接收發送緩沖區等。串口參數包括波特率、數據位、數據起始位、奇偶校驗、串口類型、發送緩沖區、接收緩沖區等,每個串口對應一個如下的數據結構:
typedef struct{
int bps;
int databits;
int stopbits;
int parity;
int siotype; //串口參數
int openflag;
int recvTrigTimeout;
SIO_D_SEND_BUFFER *pSendBuf;//發送緩沖區
SIO_D_RECV_BUFFER *pRecvBuf;//接收緩沖區
struct fasync_struct *fasync_queue;
wait_queue_head_t read_wait;
}serial_dev;
static serial_dev serial_device;
(2)文件系統操作
入口函數對應文件操作函數read ()、write()、ioctl()、open()、close()。
struct file_operations serial_fops = {
owner: THIS_MODULE,
poll: serial_poll,
read: serial_read,
write: serial_write,
ioctl: serial_ioctl,
open: serial_open,
release: serial_release,
};
(3)驅動程序注冊和注銷。
驅動程序在應用前,需要在模塊初始化時將設備注冊到系統設備表中;不再使用時,將設備從系統中卸除。注冊包括初始化定時器、初始化串口數據結構serial_device和字符設備注冊。注銷時直接調用設備注銷函數[5]。
int __init topbandserial1_init(void)
{
init_timer(timer);//初始化定時器結構
memset(serial_device, 0, sizeof(serial_device));
result=register_chrdev(SERIAL1_MAJOR, serial1,
serial_fops);
…
}
(4)串口設備打開包括分配串口的接收發送緩沖區及中斷注冊[5]。
static int serial_open(struct inode *inode, struct file *filp)
{
dev->pRecvBuf = kmalloc(sizeof(SIO_D_RECV_BUFFER), GFP_KERNEL);
request_irq(INT_UART1,serial_interrupt,SA_SHIRQ,
TopbandSerial1,serial_device);
…
}
(5)串口設備釋放包括釋放內存空間、注銷中斷和刪除定時器[5]。
static int serial_release(struct inode *inode, struct file *flip)
{
serial_dev *dev = flip->private_data;//釋放內存空間
kfree(dev->fasync_queue);
CSR_WRITE(COM_IER_1, 0x00); /* 中斷禁止 */
free_irq(INT_UART1, dev); //注銷中斷
del_timer(timer);//刪除定時器
MOD_DEC_USE_COUNT;
dev->openflag = 0;
…
}
(6)串口讀數據是指返回接收緩沖區中已收到的數據。讀取數據有兩種方式,阻塞方式和非阻塞方式。阻塞方式[6]中用戶程序執行讀操作時如果沒有數據可讀,即讓read()操作等待直到數據可讀;非阻塞方式中當用戶執行讀操作時,不論串口是否接收到數據,設備驅動xxx_read()函數會立刻返回,read()函數系統調用也隨即返回。
static int serial_read(struct file *filp, char *buf, size_t
count, loff_t *f_pos)
{
if(filp->f_flags O_NONBLOCK)/非阻塞方式讀取
retsts = serial_nonblock_read(dev,buf,count);
else /*阻塞方式讀取*/
retsts = serial_block_read(dev,buf,count);
…
}
(7)串口寫數據包括把數據存放在發送緩沖區、啟動硬件發送及發送中斷。當發送第一個字節后,硬件會產生發送中斷,剩下的數據將在中斷處理程序中發送。
static int serial_write(struct file *filp, const char *buf,
size_t count, loff_t *f_pos)
{
copy_from_user(pSendBuf->frameData[pSendBuf->
bufWritex].data[0],buf, count);
CSR_WRITE(CMBOARD_GPIO_DATAOUT1,status1);
enable_tx_interrupt_1();
…
}
(8)串口控制包括設置串口波特率、奇偶校、停止位等,還可以定義其他特殊的控制。應用程序通過ioctl()調用把串口的參數傳遞給驅動程序,驅動程序再通過對硬件串口控制寄存器進行設置,來滿足應用層用戶要求。
static int serial_ioctl(struct inode *inode, struct file *flip,
unsigned int cmd, unsigned long arg)
{
switch(cmd){
case SERIAL_IOC_BPS:
…
break;
case SERIAL_IOC_SENDBUF:
…
break;
}
}
(9)中斷處理包括對接收中斷、發送中斷、異常中斷的處理。讀取中斷寄存器的狀態,根據不同的中斷類型分別處理。當收到數據時,硬件會產生接收中斷,驅動程序把串口的數據讀取出來,放在接收緩沖區中,直到所有數據讀取完成;當發送數據時,硬件會產生發送中斷,驅動程序把發送緩沖區的數據發送出去,直到所有數據發送完成;當串口接收或發送發生異常時,會產生異常中斷,驅動程序根據情況把串口重新初始化,以便串口恢復正常。
static void serial_interrupt(int irq, void * dev_id,
struct pt_regs *regs)
{
status = CSR_READ(COM_IIR_1);
while(status UART_IIR_STATUS_NO) == 0)
{
switch(status)
{
case UART_IIR_STATUS_RDA:
case UART_IIR_STATUS_TOUT:
receive_chars(dev,status);
break;
case UART_IIR_THRE:
transmit_chars(dev);
break;
}
status = CSR_READ(COM_IIR_1);
}
}
(10)定時器處理。中斷接收程序只負責把數據讀取到緩沖區,并沒有指示緩沖區的數據可被用戶使用,這時需要在超時程序中把可用標志置上,當用戶調用read()函數時就可把接收緩沖區的數據返回。
static void serial_timer(unsigned long dummy)
{
…
serial_device.pRecvBuf->frameData
[serial_device.pRecvBuf->bufWritex].finished = 1;
mod_timer(timer,jiffies+2);/* 20 ms 進一次 */
}
通過以上幾個函數的處理,實現了串口的驅動。
4 驅動程序編譯進Linux內核
以下以UART1為例,介紹驅動程序編譯進Linux內核的過程,步驟如下:
(1)添加主次設備號。
主次設備號用來標識一個具體設備。主設備號用于標識設備類型,每種類型的設備需要一個對應的設備驅動程序。一個主設備可以有多個具體的設備與之對應。次設備號用于區分使用同種驅動程序的同類設備中多個不同的設備實例[7]。
在W90P710-?滋Clinux/?滋Clinux-distlinux-2.4.x/include/
linux目錄下的major.h中定義主設備號,添加如下代碼:
#define SERIAL1_MAJOR 230
在W90P710-?滋Clinux/?滋Clinux-dist/vendors/Winbond/W90P710目錄下的makefile中建立設備主次設備號(主設備號為230,次設備號為1),添加如下代碼:
serial1,c,230,1
(2)在W90P710-?滋Clinux/?滋Clinux-dist/linux-2.4.x/drivers/char目錄下的makefile中添加如下代碼:
obj-$(CONFIG_TOPBAND_SERIAL1)+=w90p710_serial_1.o
(3)在W90P710-?滋Clinux/?滋Clinux-dist/linux-2.4.x/drivers/char目錄下的config.in字符設備段中添加如下代碼:
#if [ $CONFIG_TOPBAND_SERIAL1 = y ]; then
bool 'Topband serial1 support' CONFIG_TOPBAND_
SERIAL1
#fi
(4)在W90P710-?滋Clinux/?滋Clinux-dist目錄下運行make menuconfig,在menuconfig的字符設備選項中可以看見剛剛添加的“CONFIG_TOPBAND_SERIAL1”選項,選上該項。使用make dep、 make clean、make三個命令編譯Linux內核,生成內核文件linux.bin[8]。
(5)在W90P710-?滋Clinux/romdisk/dev目錄下創建設備文件, 輸入命令:
mknod serial1 c 230 1
生成設備文件“serial1”,應用程序通過使用“/dev/ serial1”這個設備文件名就可對串口進行操作。
最后編寫簡單的串口測試程序,編譯生成鏡像文件;再把鏡像文件romfs.img和內核文件linux.bin下載到開發板,把開發板的串口和PC機相連,PC機端使用串口調試工具發送測試數據,開發板能正確收發數據。
本文按驅動程序的功能詳細介紹了W90P710微處理器實現串口驅動的方法,串口驅動程序是很典型的字符設備驅動程序,其他字符設備驅動和串口的實現方法是相同的,這對開發其他字符設備驅動程序有一定的借鑒作用。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)

linux相關文章:linux教程








評論