基于DSP的三相無刷直流電機(jī)系統(tǒng)

從理論上來看,直流無刷電動(dòng)機(jī)的速度和轉(zhuǎn)矩控制主要依據(jù)如下的轉(zhuǎn)矩和反電動(dòng)勢(shì)工程計(jì)算方程
其中,N為直流無刷電動(dòng)機(jī)定子每相線圈數(shù), 為轉(zhuǎn)子的長(zhǎng)度,r為轉(zhuǎn)子的內(nèi)徑,B為轉(zhuǎn)子的磁通密度, 為電動(dòng)機(jī)的角速度,i為相電流,L為相感抗, 為轉(zhuǎn)子的位置,R為相阻抗。
從方程可以看到,反電動(dòng)勢(shì)與電動(dòng)機(jī)的轉(zhuǎn)速成比例,而轉(zhuǎn)矩與相電流也幾乎勢(shì)成比例的。根據(jù)這些特點(diǎn),在方案中采用了圖3所示的控制策略。給定轉(zhuǎn)速與速度反饋形成偏差,經(jīng)速度調(diào)節(jié)后產(chǎn)生電流參考量,它與電流反饋量的偏差經(jīng)電流調(diào)節(jié)后形成PWM占空比的控制量,實(shí)現(xiàn)電動(dòng)機(jī)的速度控制。電流的反饋是通過檢測(cè)電阻上的壓降來實(shí)現(xiàn)的。速度反饋是通過霍爾傳感器輸出的位置量,經(jīng)過計(jì)算得到的。位置傳感器輸出的位置量還用于控制換相。
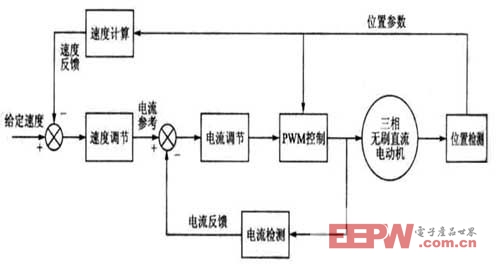
圖3 三相無刷直流電動(dòng)機(jī)的速度和電流控制
4 軟件控制
系統(tǒng)采用PWM控制算法,電機(jī)輸入直流電流且每一時(shí)刻只有兩個(gè)功率管導(dǎo)通,從2407來的PWM控制信號(hào)直接連至驅(qū)動(dòng)器,驅(qū)動(dòng)器的輸出再連至功率MOSFET管的控制極。2407的CPU時(shí)鐘頻率是20MHz,PWM頻率是20kHz。
4.1相電流檢測(cè)
TMS320LF2407A接受到電阻上放大的壓降信號(hào)后,經(jīng)由A/D轉(zhuǎn)換后得到電流信號(hào)。在轉(zhuǎn)換結(jié)束時(shí),A/D模塊向CPU發(fā)送一個(gè)中斷請(qǐng)求信號(hào),等待CPU處理。每隔50us,DSP控制器對(duì)相電流進(jìn)行采樣,從而實(shí)現(xiàn)20kHz的電流調(diào)節(jié)環(huán)。根據(jù)電流誤差,PID控制器在每個(gè)PWM周期開始時(shí)對(duì)PWM脈沖的占空比進(jìn)行調(diào)節(jié)。
4.2轉(zhuǎn)子位置和速度檢測(cè)
掌握好恰當(dāng)?shù)膿Q相時(shí)刻,可以減小轉(zhuǎn)矩的波動(dòng)。位置檢測(cè)不但用于換相控制,而且還用于產(chǎn)生速度控制量。
位置信號(hào)是通過3個(gè)霍爾傳感器得到的。他們的輸出信號(hào)相差1200。每個(gè)機(jī)械轉(zhuǎn)有6次換相,通過將DSP設(shè)置為雙沿觸發(fā)捕捉中斷功能,可以獲得正確的換相時(shí)刻。通過將DSP的捕捉口CAP1~CAP3設(shè)置為I/O口,并檢測(cè)該口的電平狀態(tài),來的到具體的捕捉中斷。
位置信號(hào)還可以用于產(chǎn)生速度控制量。只要測(cè)得兩次換相的時(shí)間間隔 ,就可以根據(jù)下式計(jì)算出兩次換相時(shí)間的平均角速度。
兩次換相的時(shí)間間隔可以通過捕捉中斷發(fā)生時(shí)讀定時(shí)器2的T2CNT寄存器的值來獲得。
4.3電流和速度調(diào)節(jié)
相電流的調(diào)節(jié)可以通過調(diào)節(jié)載頻為20kHz的PWM信號(hào)的脈沖寬度來實(shí)現(xiàn)。
Ierror=Iref - Imea
cyclenew=cycleold+IerrorK
如果cyclenew>=Timer_period, 那么cyclenew=Timer_period
如果cyclenew>Timer_period,那么cyclenew=0
其中Iref—用戶想要的參考電流;
Imea——實(shí)際測(cè)得的相電流;
Ierror——要調(diào)節(jié)的相電流誤差;
速度調(diào)節(jié)采用PI算法,以獲得最佳的動(dòng)態(tài)效果。計(jì)算公式如下:
式中Iref-速度調(diào)節(jié)輸出;
ek -第k次速度偏差;
Kp -速度比例系數(shù);
Ki -速度積分系數(shù);
T -速度調(diào)節(jié)周期;
試驗(yàn)證明能產(chǎn)生很好的三相PWM控制波形。圖5為產(chǎn)生的PWM波形。
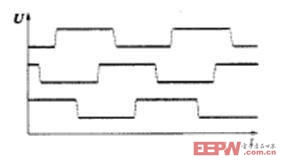
圖5 利用DSP控制三相無刷直流電動(dòng)機(jī)產(chǎn)生的PWM波形
前面所敘述的系統(tǒng)初始化、位置信號(hào)檢測(cè)、PWM信號(hào)輸出等軟件模塊,可以實(shí)現(xiàn)一個(gè)基本的具有位置傳感器的三相直流無刷電動(dòng)機(jī)速度控制系統(tǒng)。然而為了建立一個(gè)更完善的系統(tǒng),還需要增加一些功能模塊,如調(diào)節(jié)電動(dòng)機(jī)轉(zhuǎn)速的控制模塊、保存系統(tǒng)運(yùn)行數(shù)據(jù)的數(shù)據(jù)記錄模塊等,TMS320LF2407與pc機(jī)之間采用的通訊是采用RS-485進(jìn)行半雙工的接口電路。由于pc機(jī)提供的是RS233接口,需要RS-32和RS-85間進(jìn)行接口轉(zhuǎn)換。
5 結(jié)束語
本文作者創(chuàng)新點(diǎn):將工業(yè)控制中普遍使用的PI算法在DSP上實(shí)現(xiàn)PWM波形輸出,由于單片機(jī)自身性能的限制,已難以滿足高速度,高精確的電機(jī)控制要求,而用DSP則很好的實(shí)現(xiàn)用于直流無刷電機(jī)控制的PWM波形輸出。








評(píng)論