基于DSP動液面深度測試系統設計

1 引言
動液面深度是油機井的井口到井下油層表面的距離,是抽油機井定期測試中的一個重要參數。由動液面深度還可計算出井管內的平均聲速。動液面深度、井管內的平均聲速與其它測試項目的結果相結合可以充分反映抽油機井的工作狀態和產量情況,為油井的診斷和維護提供依據。
2 動液面深度測試原理
動液面深度測試儀器通過采集由安裝在井口的炮槍發出并經過井管接頭反射的節箍波信號和經過油層表面反射的液面波信號(如圖1所示),找出井口位置、動液面位置及基準節箍波,用公式(1)來計算動液面深度。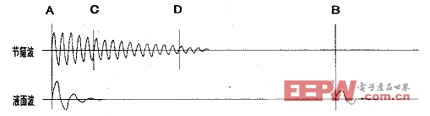
圖1節箍波和液面波波形示意圖![]()
(1)
公式(1)中A、B、C、D分別代表井口位置、液面位置、參考節箍波起點和參考節箍波終點,L為單節井管的長度,N為介于C、D之間的參考節箍波的個數。由于每個節箍波對應一節井管,因此N就是C、D之間的井管個數。
由于傳感器本身的噪聲、環境噪聲等多種噪聲源的存在,所采集到的波形并非都能如圖1那樣很容易地找出上述的各特征點,尤其是參考節箍波,這就給準確計算動液面深度帶來困難,有時甚至根本無法計算。因此對傳感器輸出信號的濾波處理成為準確計算動液面深度的關鍵。
3 傳統的動液面深度測試儀結構
目前普遍采用的動液面深度測試儀有如圖2所示的基于模擬電路的結構和如圖3所示的基于微控制器的結構。
圖2基于模擬電路的動液面深度測試儀原理框圖
圖3基于微控制器的動液面深度測試儀原理框圖
在圖2的結構中,微音器撿拾由炮槍發出并經過井管接頭和油層表面反射后返回到井口的低頻聲波信號,該信號經放大器放大后進入兩個窄帶濾波器:帶通濾波器 BPF和低通濾波器LPF。帶通濾波器的輸出即為節箍波信號,低通濾波器的輸出為液面波信號。數據采集由驅動電路控制繪圖筆在紙帶上繪制節箍波和液面波曲線來完成。井口位置、液面位置、參考節箍波起點、參考節箍波終點等特征位置的提取及動液面深度與井管內平均聲速的計算完全由技術人員手工完成。
在圖3的結構中,模擬信號的撿拾、放大和濾波部分與圖2所示的結構完全相同,但數據采集部分由微控制器系統完成。微控制器系統由微控制器、A/D轉換器、存儲器及顯示和打印接口組成。在該結構中只要找出各特征位置,則動液面深度與聲速的計算可由微控制器自動完成。在采集到的波形較理想的情況下,特征位置的提取可以在數據采集結束后由微控制器自動完成,但多數情況下由于濾波效果不好,使得自動提取的特征位置不準確,需要技術人員手工干預。
這兩種結構雖然在數據采集方式上有較大不同,但所采集到的波形的好壞均取決于信號處理通道中兩個模擬濾波器的頻率響應特性。由于這兩路信號的頻帶都很窄,這就導致了兩個濾波器在實現上需要較高的階數,又由于高階濾波器對器件參數的變化較敏感,因而給其設計和調試帶來較大困難。
4 基于數字信號處理器的動液面深度測試儀結構
基于數字信號處理器的動液面深度測試儀結構如圖4所示。微音器輸出信號經過前置放大器和防混疊濾波器后進入A/D轉換器,A/D轉換的結果送入數字信號處理器進行數字濾波處理和采樣頻率變換,然后存入非易失性存儲器,以便進行特征位置提取、動液面深度計算、井管內聲速計算、波形顯示和打印及其它事后處理。
圖4基于數字信號處理器的動液面深度測試儀原理框圖
在該結構中,傳統模擬濾波器的功能由用數字信號處理器實現的數字濾波器來完成,采用的是過采樣數字信號處理技術。系統以很高的采樣率對輸入信號進行采樣,采樣數據經過由數字信號處理器實現的兩個窄帶數字濾波器,即節箍波帶通濾波器BPF和液面波低通濾波器LPF,濾波后的兩路采樣數據分別進入兩個采樣率壓縮器。
設系統的輸出采樣頻率為fs,輸入采樣頻率為Mfs,節箍波濾波器BPF的沖擊響應為hB(k),液面波濾波器LPF的沖擊響應為hL(k),輸入采樣數據為x(n),輸出節箍波采樣數據為yB(n),輸出液面波采樣數據為yL(n),則數字信號處理器中數字濾波及采樣率變換部分的數據流圖如圖5所示。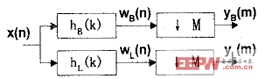
圖5DSP中的信號處理流圖
該系統在時域里的輸入—輸出關系為:
yB(m)=wB(mM)=∑hB(k)x(mM-k)
wB(n)=∑hB(k)x(n-k)
yL(m)=wL(mM)=∑hL(k)x(mM-k)
wL(n)=∑hL(k)x(n-k)
由于數字信號處理器是針對數字信號處理算法而設計的處理器,有著很高的MAC(乘和累加)運算速度,因此很容易實時完成這兩路高階窄帶數字濾波器的運算。由于本系統的輸出采樣頻率不高,因此過采樣的M值可以很大,這樣防混疊濾波器可以用簡單的二階有源模擬低通濾波器來實現。設計時可以在通帶上留較寬的裕度,即使防混疊濾波器中模擬元件的參數隨時間或溫度發生漂移,也不會影響整個信號處理系統的性能。由于信號處理的主要過程都采用了數字處理,使得系統的性能穩定、可靠,克服了圖2和圖3所示兩種結構所固有的因濾波器元件參數漂移或不一致而帶來的系統工作不穩定或設計、調試的困難。
該結構由數字信號處理器取代了傳統的模擬濾波器和微控制器,并且只使用一路模數轉換器。由于濾波效果好,使自動提取特征位置的成功率較基于微控制器的結構有較大提高,提高了工作效率。
5 結束語
文中介紹的基于數字信號處理器的動液面深度測試儀采用了數字信號處理技術,克服了傳統儀器固有的缺點,為抽油機井的動液面深度測試提供了可靠、準確、自動化程度高的測試手段。











評論