基于ARM11的家用智能垃圾桶的設(shè)計與實(shí)現(xiàn)

2.2 特定語音識別算法
針對特定語音的識別,采用動態(tài)時間規(guī)整(DTW)的算法,是一種把時間規(guī)整和距離測度的計算結(jié)合起來非線性規(guī)整技術(shù),多用于孤立詞的語音識別。語音識別過程如圖5所示。
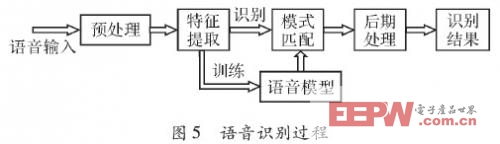
首先應(yīng)濾掉輸入語音信號的噪音并進(jìn)行預(yù)加重處理,提升高頻分量,然后線性預(yù)測系數(shù)等方法進(jìn)行頻譜分析,找出語音的特征參數(shù)作為未知模式,與預(yù)先存儲的標(biāo)準(zhǔn)模式進(jìn)行比較,當(dāng)輸入的未知模式與標(biāo)準(zhǔn)模式的特征一致時,ARM便識別輸入的語音信號并輸出結(jié)果。
3 系統(tǒng)軟件設(shè)計
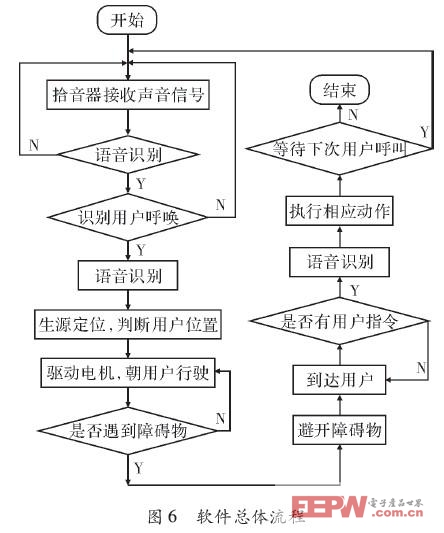
系統(tǒng)軟件主要包括:數(shù)據(jù)采集模塊、SCI通訊模塊、特定聲源定位算法模塊和避障軟件模塊。系統(tǒng)軟件總體流程圖如圖6所示。
3.1 特定聲源定位算法設(shè)計
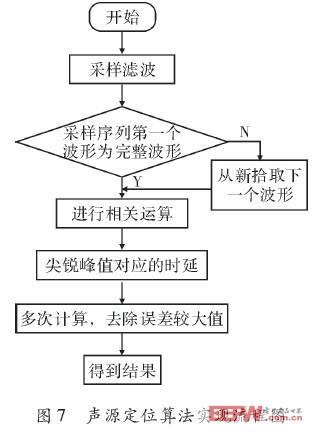
系統(tǒng)的聲源定位算法主要基于傳聲器陣列時延估計法,利用A/D采樣模塊檢測不同拾音器所接收到的聲音信號,算法實(shí)現(xiàn)采用廣義互相關(guān)法。ARM采樣得到的波形 接近為正弦波,將對應(yīng)采樣得到的值放入數(shù)組中保存,首先進(jìn)行相關(guān)運(yùn)算,得出互相關(guān)譜。為避免誤差和雜音的干擾,進(jìn)行多次計算去除了誤差較大的值。其算法流 程圖如圖7所示。
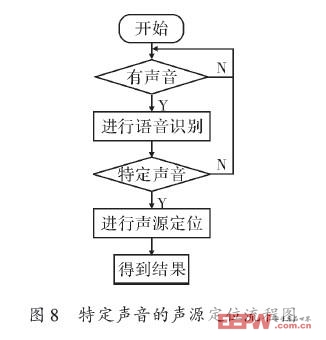
同時,為避免垃圾桶對接收到的任何聲音都進(jìn)行定位,系統(tǒng)在定位時加入了語音識別,即只對需要的聲音進(jìn)行方位判斷,對特定聲音進(jìn)行語音識別的流程框圖如圖8所示。
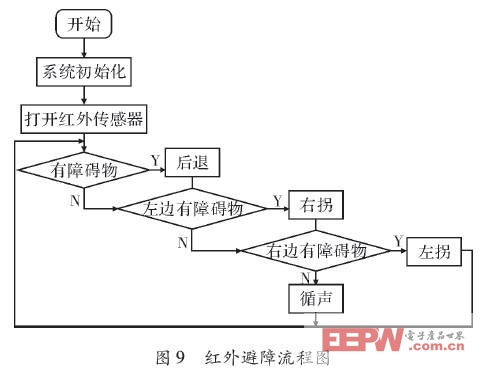
3.2 避障軟件設(shè)計
避障軟件模塊采用對ARM的GPIO口查詢方法。在垃圾桶加電后,主函數(shù)中一直查詢GPIO,某一路的GPIO出現(xiàn)低電平時,進(jìn)入相應(yīng)的子函數(shù),執(zhí)行相應(yīng)的 控制動作。3個紅外傳感器同時工作,發(fā)射紅外信號。任何一個紅外接收裝置接收到反射的紅外信號進(jìn)入相應(yīng)的子函數(shù)執(zhí)行控制電機(jī)轉(zhuǎn)動。紅外避障流程如圖9所示。
4 結(jié)束語
設(shè)計的智能垃圾桶“聽”到主人的呼喊后能自動到達(dá)主人身邊,并且能識別主人的聲音進(jìn)行一系列動作,經(jīng)試驗(yàn)證明該設(shè)計能夠滿足使用要求。
光電開關(guān)相關(guān)文章:光電開關(guān)原理








評論