一種基于SC89F516的熱源自動跟蹤系統設計方案

C.單片機最小系統模塊:
本文引用地址:http://www.104case.com/article/256788.htm
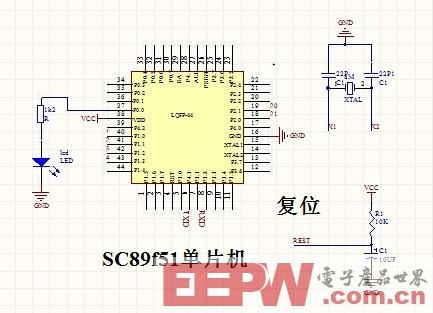
SC89F51單片機最小系統由主控芯片、復位電路、晶振電路組成。這三種電路是單片機工作的最基本方式。我們再編程時采用外部晶振,有方便替換的有點。使用上電復位目的是為了使用方便。我們將串行發送口RXD以及串行接收口TXD端口引出,其目的在于方便程序的燒寫。
3.相關參數的計算
由于要使熱敏電阻的靈敏度達到最大,就必須計算出其最佳的串聯電阻。依據經驗公式當固值電阻R=時其功率最大。(其R1為熱電阻熱R2為冷電阻)。經過多次的測量得到熱敏電阻在常溫下阻值平均為10K,在37度時為平均為9K,計算得到R=9.5K.
步進電機旋轉角度的計算。由于步進電機的轉動時靠電平一步一步執行的。其工作方式有A-B-C-D和A-AB-B-BC-C-CD-D-DA-A等幾種節拍的運行方式。步距角:對應一個脈沖信號,電機轉子轉過的角位移用θ表示。θ=360度(轉子齒數J*運行拍數),以常規二、四相,轉子齒為50齒電機為例。四拍運行時步距角為θ=360度/(50*4)=1.8度(俗稱整步),八拍運行時步距角為θ=360度/(50*8)=0.9度(俗稱半步)。這兩個概念清楚后,我們再來計算轉速,以基本步距角1.8°的步進電機為例(現在市場上常規的二、四相混合式步進電機基本步距角都是1.8°),四相八拍運行方式下,每接收一個脈沖信號,轉過0.9°,如果每秒鐘接收400個脈沖,那么轉速為每秒400*0.9°=360°,相當與每秒鐘轉一圈,每分鐘60轉。
4.軟件設計
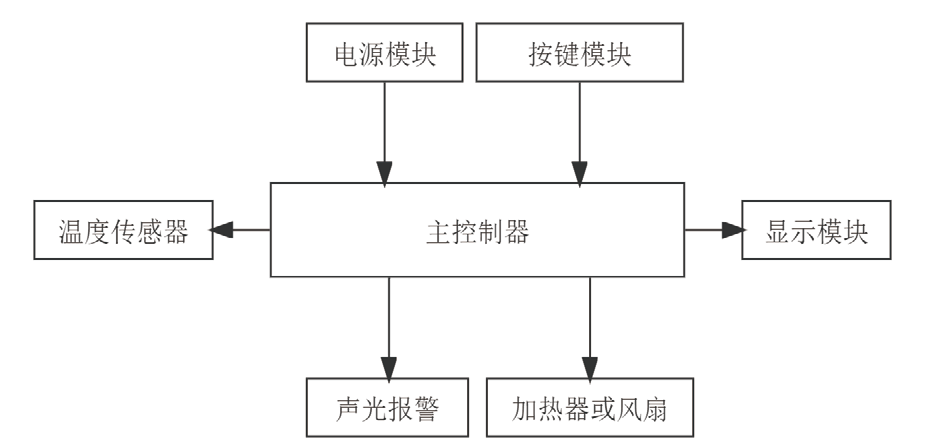
4.1程序流程圖

4.2程序流程圖的說明
該流程圖設計是按照,項目所需的功能實現的,其中有邏輯電平的判斷以及電機執行機構的電平輸出。全面考慮了系統可能出現的疏漏。在防破解方面也作出了許多方面的算法考慮。
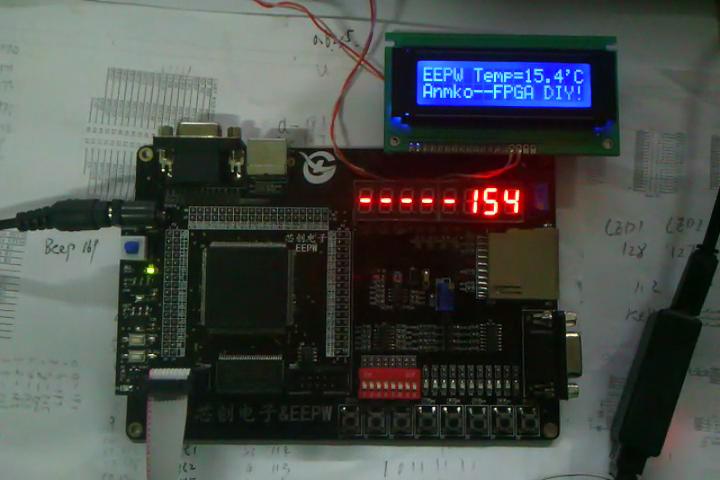
5.系統測試結果
5.1測試儀器:萬用表、數字示波器
5.2測試方法:
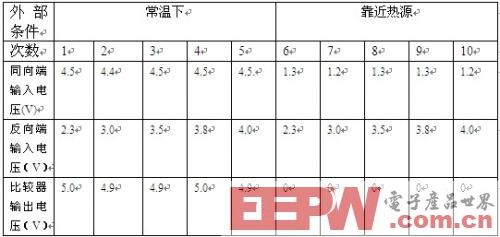
首先進行的是傳感器模塊的測試,在靠近熱源時,測量LM393的引腳電平的高低。在測試時如果未能達到相應引腳電平的變化那么就必須通過調節電位器,使LM393同向端與反向端的電壓最靠近。是系統的靈敏度最高。
測量結果如下:
6.總結
由測試結果知道,本設計完成了該項目所需的全部基本要求。

51單片機相關文章:51單片機教程
比較器相關文章:比較器工作原理







評論