基于DSP捕獲單元的柴油發電機組的轉速測量系統

1 引言
應用于高層建筑、銀行、機場和油田等場合的柴油發電機組,必須采用相應方法控制其供電電壓和頻率,以確保在機組運行中具有良好的電氣性能,滿足應用要求。其頻率控制一般是通過轉速控制實現,目前應用較多的為模擬式轉速調節器。由于模擬式調節器不易實現復雜控制規律、結構復雜。故采用數字式控制器。數字式控制器具有算法靈活.可實現復雜控制規律、抗干擾能力強等特點,是實現柴油發電機組轉速的高精度調節的理想選擇。因此,這里提出了一種以TMS320F2812 DSP為核心的轉速數字控制器的測速功能系統設計.該設計方案是進一步實現轉速數字控制的基礎。
2 轉速測量原理
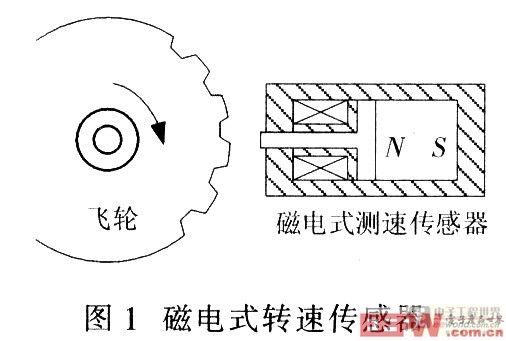
在測量和控制柴油發電機組轉速時,需用轉速傳感器檢測機組轉速.柴油發電機組經常使用磁電式轉速傳感器(圖1),該轉換傳感器是在永久磁鐵上安裝一感應線圈.并將傳感器安裝于柴油機飛輪附近.與柴油機的測速飛輪構成一個磁回路。當柴油發電機組轉動時.由于飛輪帶有齒槽,就會使回路磁阻發生變化,從而在轉速傳感器的線圈中產生感應電勢,即轉速電壓信號,轉速傳感器線圈輸出的平均電壓值為0.5~6 V,其頻率為:
f=Zn/60 (1)
式中:Z為柴油機飛輪齒數,n機組轉速。
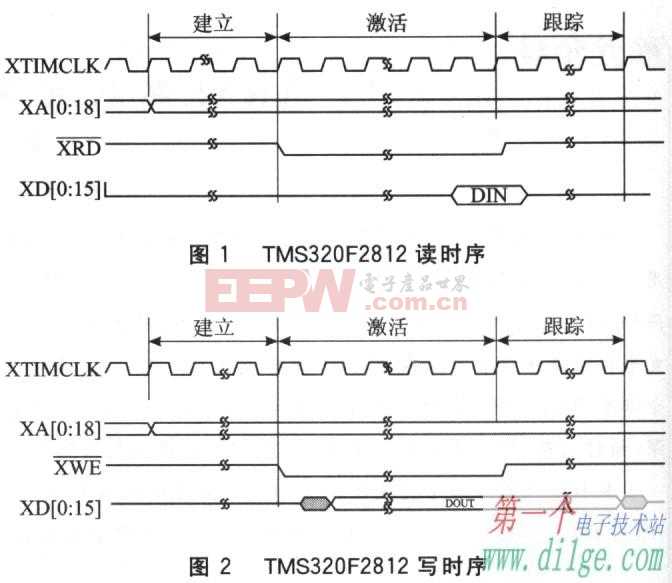
將傳感器輸出信號調理后變成速度頻率的數字信號輸入TMS320F2812 DSP的捕獲單元,捕獲被測信號電平的跳變沿(比如上升沿),從而可在被測信號的一個周期內,對標準時鐘f0的周期數計數,若得到的周期數為K,則顯然被測信號的周期(T)可表示為:
T=K/f0 (2)
于是,由(1)式和(2)式可得柴油發電機組的轉速為:
n=60f0/ZK (3)
通過DSP程序按(3)式即可計算機組轉速。
3 轉速測量系統設計
3.1 硬件電路設計
若飛輪齒數Z為159,柴油機額定轉速為1 500 r/min,根據上述測量原理,給出以TMS320F2812 DSP為核心的轉速測量系統的硬件設計,如圖2所示。
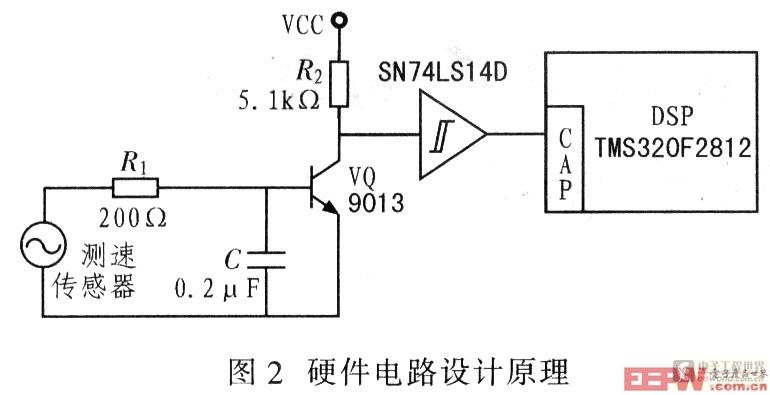
磁電式轉速傳感器的輸出信號首先由R1和C組成的濾波電路濾波,其截止頻率fc根據柴油機在額定轉速時傳感器輸出信號的頻率確定,而因fc=l/(2πR1C),從而確定R1和C,可見這兩者的取值與柴油機轉速和飛輪齒數有關。需要注意的是這兩者取值應按實際設備參數確定。傳感器輸出模擬信號,要送入DSP需將其轉換為數字信號,因此采用VQ開關狀態,經VQ轉換后其集電極輸出信號需由反相施密特觸發器變換后(即經過信號整形后)再送入DSPTMS320F2812的捕獲單元CAPl。該捕捉單元有一個專用的2級深度FIF0堆棧.頂層堆棧由CAPI FIF0組成,底層由CAPlFBOT組成。測速分兩次捕捉.第一次捕捉到引腳發生的指定變化時,捕獲單元將捕捉所選用計數器的計數值并把該值寫入FIF0堆棧的頂層寄存器.如果在第一次捕捉的值讀取之前發生第二次捕捉.新的捕捉值會被送入底層寄存器。捕獲單元捕捉到數值后.相應的中斷標志位置1,如果沒有屏蔽中斷,則產生外圍設備中斷請求。響應中斷,通過中斷服務程序讀取一對捕捉的數值。該捕捉值正好是被測信號一個周期的兩次計數。根據這兩次捕獲值,計算標準時鐘的周期數K,進而得出被測轉速。
3.2 軟件程序設計
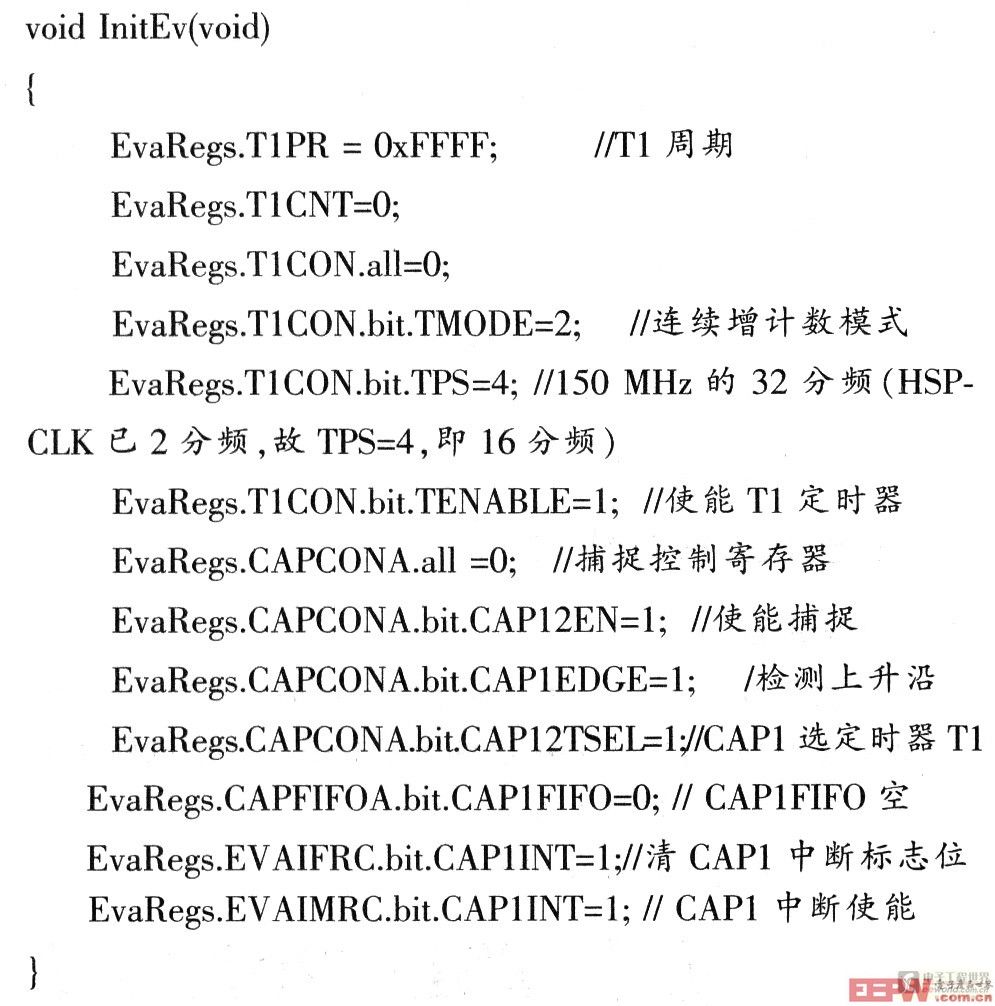
由于采用DSP的事件管理器EVA的捕獲單元CAPl,并選其定時器T1作為CAPl的時間基準,T1工作在連續遞增計數模式,并設定捕獲單元捕獲被測信號的上升沿。捕獲前要清中斷標志位,開捕獲中斷。相應初始化事件管理器EVA的程序代碼為:
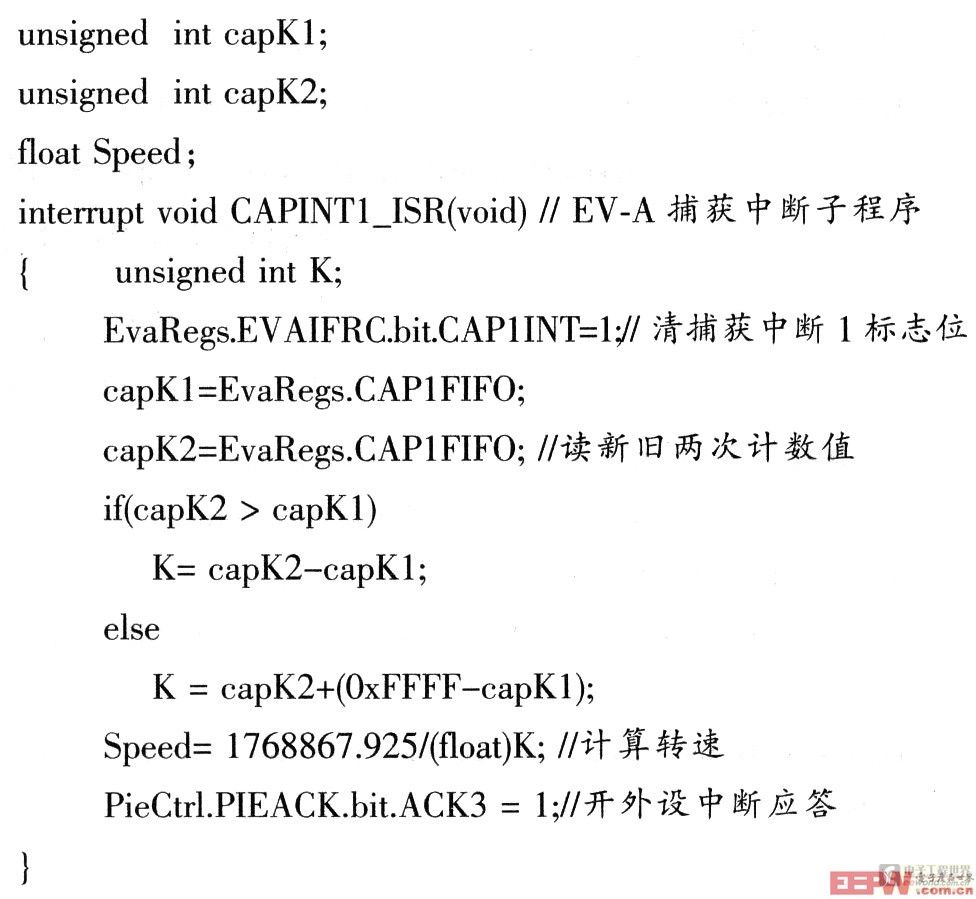
進入捕獲中斷子程序時,保護現場首先清CAPl中斷標志位,從二級深度FIF0中依次讀取兩次捕獲的計數值capKl和capK2。如果capK2>capKl,則capK2一capKl即為在被測信號的一個周期內記的標準時鐘的周期數K。若capK2capKl,則說明在計數過程中有計數溢出,即計數到周期寄存器T1PR內寫入的OxFFFF后回零重新計數,因此K=capK2一capKl+0xFFFF。這里時基T1的頻率為主頻時鐘除以分頻系數,即f0=150 MHz/32,因此所測速度為n=60f0/(ZK)=1768 867.925/K。下面為捕獲中斷子程序代碼:
4 結語
基于磁電式轉速傳感器和TMS320F2812 DSP的捕獲單元實現的柴油發電機組轉速數字控制器的轉速測量系統,其硬件設計簡單,測量精度較高。經實驗測試,在機組轉速80~1500 r/min時,測量誤差均低于0.2%,完全滿足柴油機發電機組轉速測量和控制的要求,有較高的實際應用價值。


評論