基于虛擬儀器的雷達信號模擬系統

3.2.2 基于驅動程序的儀器控制模塊設計
儀器驅動程序是實現儀器功能的控制函數和參數的集合。它是軟件與儀器通信的橋梁。儀器都在出產時隨產品附帶了相應的驅動程序,而虛擬儀器軟件建立在儀器驅動程序之上[6],通過接收用戶操作面板傳來的用戶設置參數,實現豐富的信號設置功能,完成自動控制的任務。通過調用儀器驅動程序的接口函數 [7], [8], [9]可以設計出符合功能需求的系統。
圖4說明了軟件的流程。軟件的功能包括儀器的尋址,儀器間的相參設置,重采樣時鐘設置,每一級輸出功率配置,觸發源的選擇,觸發脈沖PRF值的配置,輸出信號中心頻率的配置,信號波形的建模,數據生成和存取,以及波形的輸出回放控制。其中波形回放控制部分是一個子進程,其流程圖如圖5所示。它的功能是通過調用任意波形發生器驅動程序的函數,控制任意波形發生器的波形回放過程。兩個分支分別實現單一脈沖波形的輸出和脈沖波形序列的輸出。
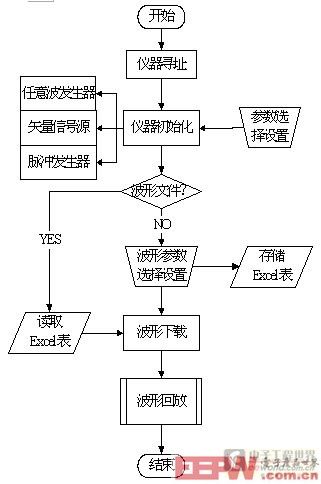
圖4 虛擬儀器程序執行流程圖
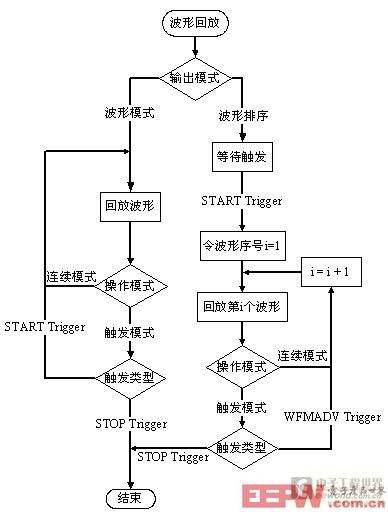
圖5. 波形回放流程圖
圖6是任意波形發生器在單一波形輸出模式下時,在PRF = 2000KHz的觸發脈沖控制下,輸出的I/Q兩路線性調頻基帶(-300~+300MHz)模擬信號在數字存儲示波器上顯示的圖像。觸發脈沖寬度為300us,脈沖波形寬度為16us。
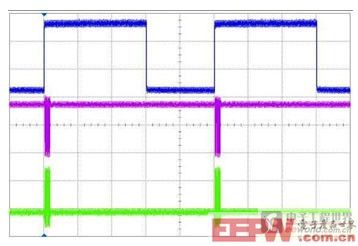
a. 時間軸分辨率100us/格
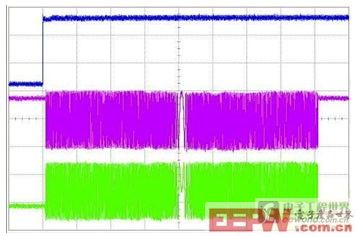
b. 時間軸分辨率2.00us/格
圖6. 線性調頻信號及觸發脈沖
4 結束語
基于虛擬儀器的雷達信號模擬系統較之以往的專用雷達信號系統有以下幾個創新點:
1) 通用性:波形信號形式,中心頻率,功率,脈沖重復頻率等都可以進行很靈活的設置。
2) 軟件定義系統功能,方便系統的升級,容易集成其它儀器儀表到系統中,擴充系統功能。
3) 充分利用實驗室資源,降低研發成本和周期,適用于雷達系統新體制的研發和實驗階段

p2p機相關文章:p2p原理
評論