關(guān)于示波器中測(cè)量參數(shù)的算法

象寬度、周期和延遲這樣的時(shí)間參數(shù)都在中間線處測(cè)量(圖二)。中間線位于基底線和基頂線的中間位置(50%)。時(shí)間參數(shù)的計(jì)算依賴于觀察窗內(nèi)包含的周期的數(shù)量。如果周期的數(shù)量不是整數(shù),參數(shù)的測(cè)量,如有效值(RMS)或均值(MEAN)這樣的參數(shù))是有誤差的。為避免這種偏差,儀器使用周期參數(shù),包括crms 和cmean,這些參數(shù)強(qiáng)迫在整數(shù)個(gè)周期內(nèi)進(jìn)行計(jì)算。
在示波器水平軸測(cè)量中有一個(gè)常被忽略的選項(xiàng)叫Hysteresis(磁滯)。 Hysteresis選項(xiàng)利用了電平之上或之下的限制,這能防止測(cè)量到噪聲或其它干擾。Hysteresis的設(shè)置以milli-divisions(千分之一格)為單位指定,其設(shè)置的原則是:1. Hysteresis 必須大于您希望忽略掉的最大噪聲尖峰。 2.可用的最大Hysteresis 值小于從電平到最近的波形極值的距離。3.除非您知道將在任何周期內(nèi)發(fā)生的最大的噪聲和最近的極值電平,否則就在電平的兩側(cè)留出余量。圖三所示為測(cè)試頻率為61.44MHz時(shí)鐘的TIE@lv參數(shù),但PLL在計(jì)算頻率時(shí)得到的結(jié)果為5.334099599GHz,這是因?yàn)槿笔r(shí)Hystersis系數(shù)為500mdiv(即0.5格),示波器中將時(shí)鐘上升沿和下降沿的回鉤都當(dāng)作了是一個(gè)個(gè)小的脈沖來計(jì)算頻率,TIE@lv的測(cè)試結(jié)果也當(dāng)然錯(cuò)了。

圖三 使用TIE的缺省設(shè)置,Hysteresis值為500mdiv
由于時(shí)鐘邊沿存在回溝,所以必須增大遲滯系數(shù),在圖四中修改為2div,如下所示,這時(shí)示波器找到了正確的頻率61.44MHz,TIE抖動(dòng)的峰峰值為P5=495ps,有效值為P1的sdev 等于141ps。
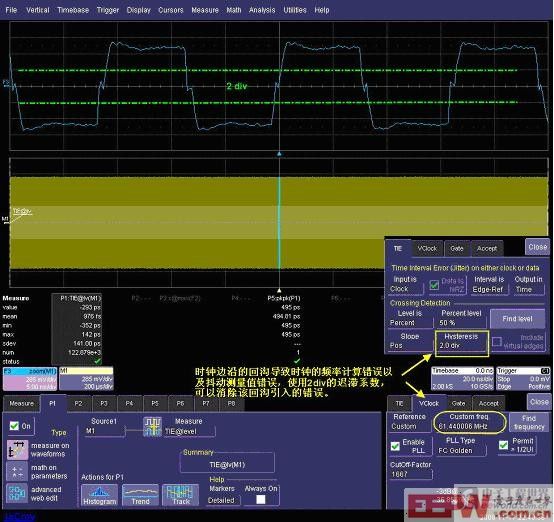
圖四 修改TIE的Hystersis設(shè)置
在應(yīng)用一些參數(shù)進(jìn)行測(cè)量時(shí),我們都應(yīng)知道這些參數(shù)在示波器中是怎樣定義的,了解每一個(gè)設(shè)置菜單是什么含義。老板說,以“知其所以然”的態(tài)度面對(duì)問題是做工程師的好習(xí)慣












評(píng)論