帶修正因子模糊PID控制的PMSM交流伺服系統

3 系統仿真結果
為了比較PID控制和Fuzzyr-PID控制性能,圖3和圖4給出了分別采用PID控制和Fuzzy-PID控制時的速度階躍響應。
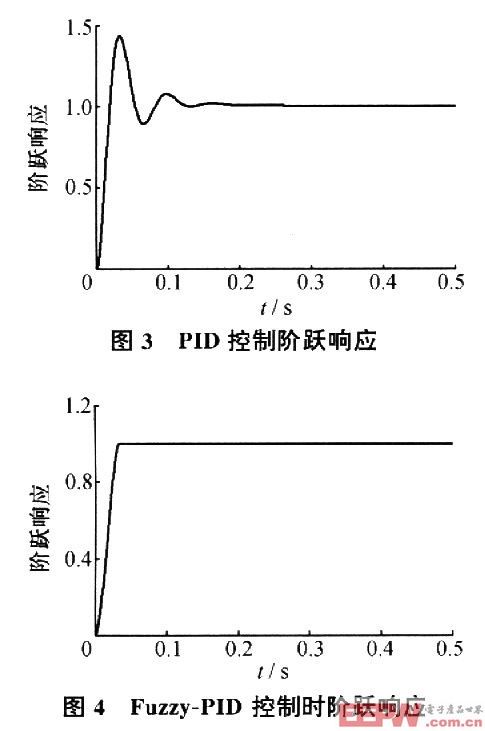
由圖可以看出,當采用PID控制時,速度出現超調和振蕩現象,這將在電機啟動過程中造成很大的沖擊;采用Fuzzy-PID后,無超調和振蕩現象,魯棒性好,系統響應速度明顯改善。
圖5和圖6為對本系統采用Fuzzy-PID)控制時轉矩Te和轉速n的仿真圖。由圖可知,當負載轉矩在0.2 s由4Nm突然增至7Nm時,轉矩很快調整到新的穩定值;同時由于SVPWM的連續調節,轉矩的脈動小;而轉速在O.2 s時稍微下降,后迅速恢復原速度。
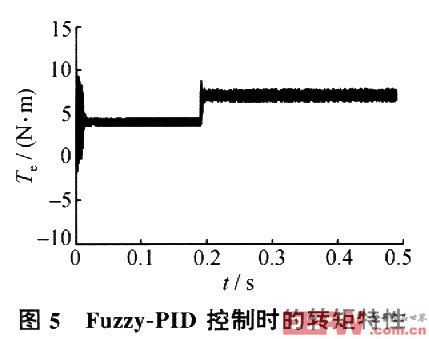
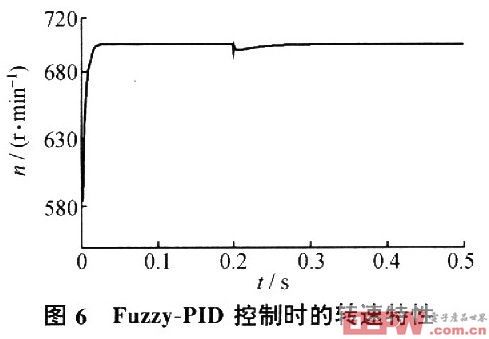
由此可見,系統所采用的控制策略具有跟蹤性能好、響應速度快、過渡時間短、無超調、穩定性好以及控制精度高等特點,這與前面的理論分析是一致的。
4 結 論
本文將fuzzy控制和PID控制相結合,應用到PMSM交流伺服控制系統當中,不僅避免了控制器的設計時受被控對象的復雜數學模型的限制,而且克服了伺服系統的時變性、強耦合性和不確定性因素的影響,提高了系統響應速度和控制精度,跟蹤性能好。另外,為了改善模糊控制器的性能系統控制,利用修正因子對模糊控制器的參數進行在線修改,保證了系統具有良好的動態和靜態性能和魯棒性,證明了此方法的正確性和可行性。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理









評論