一款基于DSP的循跡及自平衡的智能小車設計

本文引用地址:http://www.104case.com/article/248192.htm
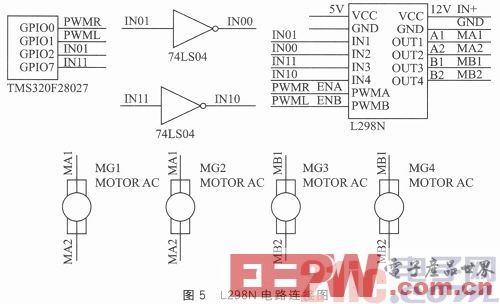
方向設定主要函數如下:

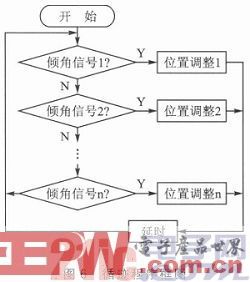
配合循跡模塊即可實現小車循跡功能。循跡模塊分為前后4路,前4路的4個信號端口與后4路并聯,前4路的4個紅外循跡模塊由一個I/O口供電,后4路供電由此I/O口經一非門供給。只需改變此I/O的高低電平即可完成前后循跡模塊的切換。循跡程序框圖如圖6所示。
循跡主要程序如下:


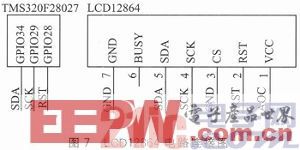
2.3 LCD12864電路連接
為了節省I/O口,顯示選用的LCD為SPI傳輸型,主要用于必要數據顯示以及菜單和系統狀態顯示。該模塊一共有10個引腳,其中除去電源引腳和空引腳還有RET引腳用于上電復位,CS引腳傳輸主從狀態選擇,SCK引腳時鐘信號輸入,SDA引腳數據輸入,BUSY引腳判忙接口。由于I/O口的限制,我們采用的并非SPI數據傳輸模式,而是選用的模擬SPI數據傳輸。模擬SPI主要是對數據傳輸時序進行模擬。
模擬SPI數據傳輸,只能對數據進行一位一位的傳輸。因為此時序為上升沿觸發,所以在傳輸之前時鐘信號置低,傳輸結束后置高。但是程序的編寫比較麻煩,因為此LCD的命令和數據都是8位數據。所以選擇按位與加移位實現輸入8位數據,具體程序如下:

在實際操作中,每次上電需要對LCD進行復位設置(RST先置低10 ms左右,然后置高20 ms左右)這樣才能保證LCD正常顯示,同時在命令和數據傳輸之前需要對LCD進行初始化操作,即對LCD進行清屏操作(清除上電一瞬間的亂碼顯示),然后根據需求進行亮度設置。由于此設計中LCD只需進行數據的接收,所以CS片選端直接接地,設置LCD為從輸入設備即可。具體電路連接如圖7所示。
2.4 傾角傳感器電路連接
傾角傳感器選用的是數字信號傳輸的MMA7361,此模塊能夠檢測器件的X/Y/Z三軸的傾斜角度,以及期間的加速度。小車在蹺蹺板上尋找平衡只需一個軸檢測傾角即可,所以任選一軸與小車車面平行,豎直指向車頭即可。
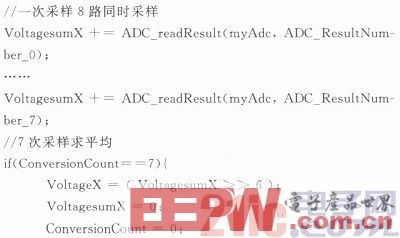
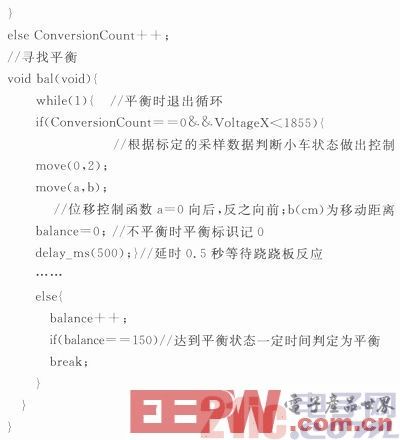
當小車發生前后傾斜時,輸出電壓改變,通過輸出電壓的線性變化反映小車的傾角、運動加速度,以及運動的方向。通過A/D采樣進行相應的電壓/角度、電壓/加速度轉換,這樣便可以時刻調節小車姿態。
傾角傳感器A/D采樣程序設定如下:
結語
本文只用了TMS320F28027的部分功能,算法也比較簡單,只是為大家的學習交流拋磚引玉而已。TMS320F28027還有很多強大的功能,有待以后大家的學習和使用。
個人的使用經驗表明TMS320F28027運算速度快,而且操作簡單易學,不僅適合完成各種業余的電子設計制作,而且也能滿足專業人士的大部分需求,是性價比較高的芯片。在配合外部擴展硬件的使用過程中,需仔細閱讀TMS320F28027和硬件模塊的電氣參數,以防止元器件的損毀。

pwm相關文章:pwm是什么
模數轉換器相關文章:模數轉換器工作原理
傾角傳感器相關文章:傾角傳感器原理









評論