用直擴MODEM和GPS實現的網型無線通信系統

 利用直擴MODEM和通信控制器,為DTE終端提供無線數據通信功能。系統為每個工作站設置不同的工作時隙,在GPS定時信息的協調下,完成系統內各工作站之間數據的收/發。該系統作為網絡無線系統,可廣泛應用于軍事、交通、商業等領域。 1 系統組成及工作原理 系統由若干工作站組成。根據工作站的多少,劃分周期的長短;在一個周期內,又分為若干個時隙,每個工作站分配一個發送時隙。在本系統中,周期為1s,每個時隙50ms,每個工作站利用GPS秒脈沖和數據信息,根據系統設置的發磅時隙完成數據的發送。當一個工作站發送時,其余工作站都處于接收狀態,系統組成如圖1所示。 每個工作站包括:直擴MODEM、通信控制器、GPS接收機和DTE終端。直擴MODEM采用半雙工方式工作,通俗控制器控制它的收/發轉換,最高工作速率可達76.8kbps,本系統采用9.6kbps,數據格式為1個起始位、8個數據位、1個停止位、無奇偶校驗位。通信控制器負責整個系統的控制工作,它完成三方面的工作:其一是接收GPS的秒脈沖信號和GPS的時間信息,為系統提供時隙定時;其二是與DTE終端進行數據交換;最后實現與直擴MODEM的數據交換。GPS接收機為通信控制提供秒脈沖信號和GPS的時間信息。DTE終端形成欲發送的信息并接收通信控制器送來的其它工作站的信息。無線直擴MODEM為工作站的收發信機,它的收發狀態由通信控制器管理。
利用直擴MODEM和通信控制器,為DTE終端提供無線數據通信功能。系統為每個工作站設置不同的工作時隙,在GPS定時信息的協調下,完成系統內各工作站之間數據的收/發。該系統作為網絡無線系統,可廣泛應用于軍事、交通、商業等領域。 1 系統組成及工作原理 系統由若干工作站組成。根據工作站的多少,劃分周期的長短;在一個周期內,又分為若干個時隙,每個工作站分配一個發送時隙。在本系統中,周期為1s,每個時隙50ms,每個工作站利用GPS秒脈沖和數據信息,根據系統設置的發磅時隙完成數據的發送。當一個工作站發送時,其余工作站都處于接收狀態,系統組成如圖1所示。 每個工作站包括:直擴MODEM、通信控制器、GPS接收機和DTE終端。直擴MODEM采用半雙工方式工作,通俗控制器控制它的收/發轉換,最高工作速率可達76.8kbps,本系統采用9.6kbps,數據格式為1個起始位、8個數據位、1個停止位、無奇偶校驗位。通信控制器負責整個系統的控制工作,它完成三方面的工作:其一是接收GPS的秒脈沖信號和GPS的時間信息,為系統提供時隙定時;其二是與DTE終端進行數據交換;最后實現與直擴MODEM的數據交換。GPS接收機為通信控制提供秒脈沖信號和GPS的時間信息。DTE終端形成欲發送的信息并接收通信控制器送來的其它工作站的信息。無線直擴MODEM為工作站的收發信機,它的收發狀態由通信控制器管理。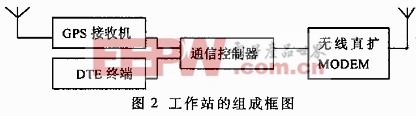 工作站的組成框圖如圖2所示。 本系統每個工作站發送一次的數據量為40字節,MODEM速率9.6kbps。考慮到MODEM的收發轉換時間和每個時隙的保護時間,每個時隙大小定為50ms,定義一個周期為1s,系統容量為20個工作站。系統內每個工作站采用相同的PN碼,并且每個工作站預先設置一個發送時隙。當系統的工作時隙與工作站的預置時隙相同時,該工作站處于發送狀態;而在其他時隙,該工作站一直處于接收狀態,接收其它工作站發來的信息。 2 工作站的硬件設計與實現 工作站由直擴MODEM、通信控制器、GPS接收機和DTE終端等四部分組成,圖3是其電路連接圖。 GPS接收機和DTE數據終端與通信控制器采用RS-232接口,通信控制器使用2片8251。其中,8251(I)將收到的GPS信息送至MCU 89C51(I),89C51(I)通過自身串口將DTE終端的數據發往直擴MODEM,8251(II)接收直擴MDOEM收到的其它工作站的數據,并將其送往本工作站的DTE終端。通信控制器中的工作時隙設置規定了該工作站的發送時隙。兩片MAX238實現RS-232與TTL電平轉換,其中,秒脈沖為89C51(I)提供時隙定時中斷,在系統時間為該工作站發送時隙時,89C51(I)產生中斷INT給89C51(II),89C51(II)輸出/PTT有效信號,使射頻模塊完成收/發轉換。 直擴MODEM主要由擴頻芯片W9310、射頻模塊W9360、MCU 89C51(II)和直擴MODEM的參數預置等電路組成。該擴頻芯片的碼長32位,PN由MCU設定,可以全雙工或半雙工方式工作。它的發射功率分為高低兩檔,如果達不到想要的傳輸距離,可外接功放;直擴MODEM可根據系統的作用距離、傳輸速率及工作方式等靈活設置,89C51(II)除設置直擴MODEM的工作狀態外,還接收通信控制器中89C51(I)送來的收發中斷INT信號,使射頻模塊完成收/發轉換,建立通信鏈路。 系統中接收和發送的數據均由DTE終端提供。 GPS的數據中除時間信息外,還包括經度、糾度及速度等其它信息。這里,僅讀取它時間信息,結合GPS秒脈沖,實現系統的時隙定時。GPS的數據格式如下: STXiddddditidddddit……iddddditETX其中,STX:ASCII中的STX字符 id:數據項標識(單個字符) dddd:數據項內容 it:數據項結構((CR)或(CR)(LF)) ETX:ASCII中的ETX字符 3 工作站的軟件設計與實現 根據系統的工作原理,每個工作站在發送時隙要完成鏈路建立、RTS請求發送和數據發送三部分,在其它時隙接收其它工作站發送的信息。系統時序如圖4所示。
工作站的組成框圖如圖2所示。 本系統每個工作站發送一次的數據量為40字節,MODEM速率9.6kbps。考慮到MODEM的收發轉換時間和每個時隙的保護時間,每個時隙大小定為50ms,定義一個周期為1s,系統容量為20個工作站。系統內每個工作站采用相同的PN碼,并且每個工作站預先設置一個發送時隙。當系統的工作時隙與工作站的預置時隙相同時,該工作站處于發送狀態;而在其他時隙,該工作站一直處于接收狀態,接收其它工作站發來的信息。 2 工作站的硬件設計與實現 工作站由直擴MODEM、通信控制器、GPS接收機和DTE終端等四部分組成,圖3是其電路連接圖。 GPS接收機和DTE數據終端與通信控制器采用RS-232接口,通信控制器使用2片8251。其中,8251(I)將收到的GPS信息送至MCU 89C51(I),89C51(I)通過自身串口將DTE終端的數據發往直擴MODEM,8251(II)接收直擴MDOEM收到的其它工作站的數據,并將其送往本工作站的DTE終端。通信控制器中的工作時隙設置規定了該工作站的發送時隙。兩片MAX238實現RS-232與TTL電平轉換,其中,秒脈沖為89C51(I)提供時隙定時中斷,在系統時間為該工作站發送時隙時,89C51(I)產生中斷INT給89C51(II),89C51(II)輸出/PTT有效信號,使射頻模塊完成收/發轉換。 直擴MODEM主要由擴頻芯片W9310、射頻模塊W9360、MCU 89C51(II)和直擴MODEM的參數預置等電路組成。該擴頻芯片的碼長32位,PN由MCU設定,可以全雙工或半雙工方式工作。它的發射功率分為高低兩檔,如果達不到想要的傳輸距離,可外接功放;直擴MODEM可根據系統的作用距離、傳輸速率及工作方式等靈活設置,89C51(II)除設置直擴MODEM的工作狀態外,還接收通信控制器中89C51(I)送來的收發中斷INT信號,使射頻模塊完成收/發轉換,建立通信鏈路。 系統中接收和發送的數據均由DTE終端提供。 GPS的數據中除時間信息外,還包括經度、糾度及速度等其它信息。這里,僅讀取它時間信息,結合GPS秒脈沖,實現系統的時隙定時。GPS的數據格式如下: STXiddddditidddddit……iddddditETX其中,STX:ASCII中的STX字符 id:數據項標識(單個字符) dddd:數據項內容 it:數據項結構((CR)或(CR)(LF)) ETX:ASCII中的ETX字符 3 工作站的軟件設計與實現 根據系統的工作原理,每個工作站在發送時隙要完成鏈路建立、RTS請求發送和數據發送三部分,在其它時隙接收其它工作站發送的信息。系統時序如圖4所示。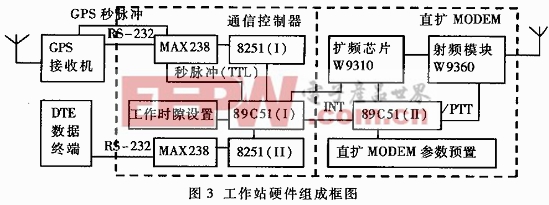 秒脈沖重復周期1秒鐘,每個工作站的發送時間50ms。在每個工作站的發送時隙,該工作站首先讓建鏈/拆鏈信號產生一個負脈沖,使直擴MODEM由接收狀態轉為發送狀態,并與其它工作站開始建立鏈路。在鏈路建立后,通信控制器送/RTS信號,告知直擴MODEM,通信控制器隨后將發送DTE的數據,這些數據發往其它工作站。在發送時隙結束時,該工作站要完成二個任務,其一是/RTS由低變高,通信控制器停止該工作站的DTE向外發送數據,第二是建鏈/拆鏈信號產生一個負脈沖,使直擴MODEM拆鏈,該工作站的發送任務結束,直擴MODEM由發送狀態轉為接收狀態,最后留有一點保護時間。至此該工作站的發送工作全部結束,其它工作站開始重復該工作站的發送時序,直到系統內20個工作站在1秒內完全發送一次。下一個秒脈沖到來時,系統重復上一秒內的發送順序,各工作站根據設置的時隙編號輪流發送。 由圖4系統工作時序可見,各工作站的程序分為兩部分:通信控制器的軟件流程和直擴MODEM的軟件流程,它們實現的任務不同。
秒脈沖重復周期1秒鐘,每個工作站的發送時間50ms。在每個工作站的發送時隙,該工作站首先讓建鏈/拆鏈信號產生一個負脈沖,使直擴MODEM由接收狀態轉為發送狀態,并與其它工作站開始建立鏈路。在鏈路建立后,通信控制器送/RTS信號,告知直擴MODEM,通信控制器隨后將發送DTE的數據,這些數據發往其它工作站。在發送時隙結束時,該工作站要完成二個任務,其一是/RTS由低變高,通信控制器停止該工作站的DTE向外發送數據,第二是建鏈/拆鏈信號產生一個負脈沖,使直擴MODEM拆鏈,該工作站的發送任務結束,直擴MODEM由發送狀態轉為接收狀態,最后留有一點保護時間。至此該工作站的發送工作全部結束,其它工作站開始重復該工作站的發送時序,直到系統內20個工作站在1秒內完全發送一次。下一個秒脈沖到來時,系統重復上一秒內的發送順序,各工作站根據設置的時隙編號輪流發送。 由圖4系統工作時序可見,各工作站的程序分為兩部分:通信控制器的軟件流程和直擴MODEM的軟件流程,它們實現的任務不同。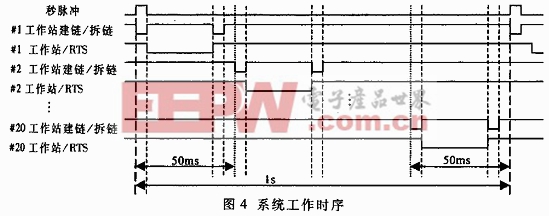 通信控制器實現的功能有: %26;#183;接收GPS秒脈沖中斷和時間信息; %26;#183;接收直擴MODEM收到的其它工作站的信息; %26;#183;向DTE發送直擴MODEM收到的其它工作站的信息; %26;#183;向直擴MODEM發送該工作站要發往其它工作站的信息; %26;#183;向直擴MODEM請求建鏈、拆鏈和傳數的控制信息,即建鏈/拆鏈信號、/RTS信號; %26;#183;利用GPS秒脈沖中斷實現系統定時; %26;#183;利用89C51(I)片內定時器,由89C51(I)輸出/RTS、建鏈/拆鏈控制信號。 直擴MODEM除完成序列加解擴、射頻信號的發送/接收等功能外,由于篇幅限制,這里只寫出通信控制器要求它實現的功能,主要包括: %26;#183;根據通信控制器發送的建鏈信號,控制射頻模塊W9360完成由接收到發送的狀態轉換,與其它工作站建立半雙工鏈路。
通信控制器實現的功能有: %26;#183;接收GPS秒脈沖中斷和時間信息; %26;#183;接收直擴MODEM收到的其它工作站的信息; %26;#183;向DTE發送直擴MODEM收到的其它工作站的信息; %26;#183;向直擴MODEM發送該工作站要發往其它工作站的信息; %26;#183;向直擴MODEM請求建鏈、拆鏈和傳數的控制信息,即建鏈/拆鏈信號、/RTS信號; %26;#183;利用GPS秒脈沖中斷實現系統定時; %26;#183;利用89C51(I)片內定時器,由89C51(I)輸出/RTS、建鏈/拆鏈控制信號。 直擴MODEM除完成序列加解擴、射頻信號的發送/接收等功能外,由于篇幅限制,這里只寫出通信控制器要求它實現的功能,主要包括: %26;#183;根據通信控制器發送的建鏈信號,控制射頻模塊W9360完成由接收到發送的狀態轉換,與其它工作站建立半雙工鏈路。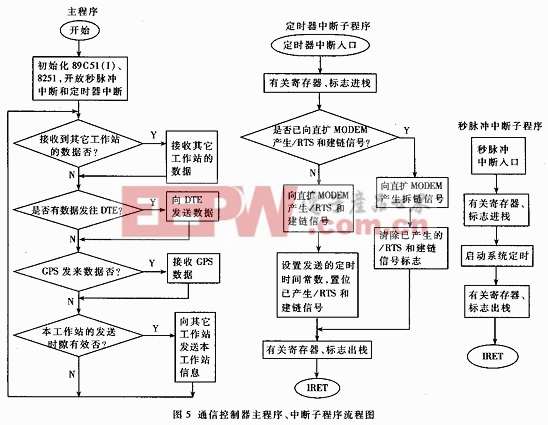 %26;#183;根據通信控制器發送的/RTS信號,將通信控制器送來的數據輻射出去。 根據以上的功能描述,通信控制器和直擴MODEM的程序流程圖分別如圖5、圖6所示。 通信控制器的程序流程圖中,秒脈沖定時中斷子程序生產系統時間基準的起始點,由它啟動系統定時。定時器中斷子程序根據該工作站的發送時隙,產生中斷信號,89C51(I)向直擴MODEM發送/發送/RTS和建鏈、拆鏈信號,控制直擴MODEM完成收、發狀態轉換,主程序首先初始化89C51(I)、8251,開放秒脈沖中斷和定時器中斷,然后采用查詢方法,控制數據的接收與發送,包括接收GPS秒脈沖中斷和時間信息、接收直擴MODEM收到的其它工作站的信息、
%26;#183;根據通信控制器發送的/RTS信號,將通信控制器送來的數據輻射出去。 根據以上的功能描述,通信控制器和直擴MODEM的程序流程圖分別如圖5、圖6所示。 通信控制器的程序流程圖中,秒脈沖定時中斷子程序生產系統時間基準的起始點,由它啟動系統定時。定時器中斷子程序根據該工作站的發送時隙,產生中斷信號,89C51(I)向直擴MODEM發送/發送/RTS和建鏈、拆鏈信號,控制直擴MODEM完成收、發狀態轉換,主程序首先初始化89C51(I)、8251,開放秒脈沖中斷和定時器中斷,然后采用查詢方法,控制數據的接收與發送,包括接收GPS秒脈沖中斷和時間信息、接收直擴MODEM收到的其它工作站的信息、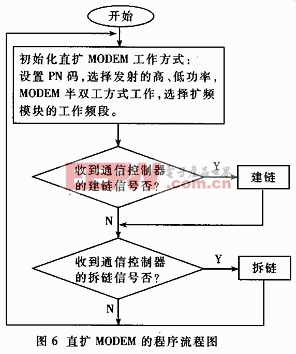 向DTE發送直擴MODEM收到的其它工作站的信息以及向直擴MODEM發送該工作站要發往其它工作站的信息。 直擴MODEM的程序流程圖中,直擴MODEM根據通信控制器送來的建鏈、拆鏈信號,建立與其它工作站的半雙工鏈路,實現擴頻模塊的收、發工作狀態轉換,完成數據傳輸。 4 系統的一種典型應用 傘兵救援是該系統應用的一個典型例子。 傘兵從飛機上跳傘時,由于跳傘的時間不同,風速、風向的變化,所以,他們落地時會在一起的范圍內。每人佩帶這樣一個工作站,在飛機起飛前,將傘兵降落地區的地形圖存在工作站的DTE終端中,并且為每個傘兵分配一個工作時隙。這樣,在他們落地后,工作站就會自動將每個傘兵的位置和他們收集到的信息傳送給其它傘兵,為他們順利完成任務提供有力保障。 本文基于GPS的網型無線通信系統在實際應用中性能穩定可靠,較好地滿足了使用要求。 根據實際使用情況,本系統可在以下幾方面進行改進: %26;#183;本系統的一個周期定為1s。在實際使用時,可以利用秒脈沖和GPS的時間信息,增加一個周期的時間;另外,每個工作站發送的時隙的長短也可根據數據的多少、傳輸速率的大小設置。
向DTE發送直擴MODEM收到的其它工作站的信息以及向直擴MODEM發送該工作站要發往其它工作站的信息。 直擴MODEM的程序流程圖中,直擴MODEM根據通信控制器送來的建鏈、拆鏈信號,建立與其它工作站的半雙工鏈路,實現擴頻模塊的收、發工作狀態轉換,完成數據傳輸。 4 系統的一種典型應用 傘兵救援是該系統應用的一個典型例子。 傘兵從飛機上跳傘時,由于跳傘的時間不同,風速、風向的變化,所以,他們落地時會在一起的范圍內。每人佩帶這樣一個工作站,在飛機起飛前,將傘兵降落地區的地形圖存在工作站的DTE終端中,并且為每個傘兵分配一個工作時隙。這樣,在他們落地后,工作站就會自動將每個傘兵的位置和他們收集到的信息傳送給其它傘兵,為他們順利完成任務提供有力保障。 本文基于GPS的網型無線通信系統在實際應用中性能穩定可靠,較好地滿足了使用要求。 根據實際使用情況,本系統可在以下幾方面進行改進: %26;#183;本系統的一個周期定為1s。在實際使用時,可以利用秒脈沖和GPS的時間信息,增加一個周期的時間;另外,每個工作站發送的時隙的長短也可根據數據的多少、傳輸速率的大小設置。








評論