飛利浦51LPC系列單片機用于控制交流電機

摘要:飛利浦公司研制的51LPC系列單片機是采用兩倍速80C51內(nèi)核,具有低成本、低功耗、低電磁干擾(EMI)、高抗干擾性及內(nèi)建電源Brownout偵測、模擬功能、UART、I2C和片內(nèi)RC振蕩器的新一代單片機。本文介紹51LPC系列單片機控制交流電機的原理電路和源程序。
本文引用地址:http://www.104case.com/article/244607.htm關(guān)鍵詞:P87LPC761 Brownout偵側(cè) 模擬比較器 EMI 電流過零檢測 半波整流 雙向可控硅
1 概述
PHILIPS 51LPC系列單片機目前已包括P87LPC760/1/2/4/7/8/9共七個型號。51LPC提供高速和低速的晶振和RC振蕩方式,可編程選擇;具有較寬的操作電壓范圍2.7~6.0V,可編程I/O口線輸出模式選擇,可選擇施密特觸發(fā)輸入,LED驅(qū)動輸出;有內(nèi)部看門狗定時器及提供掉電檢測模擬功能,最大限度地減少了外部元件的使用。這些特性和改進的C51結(jié)構(gòu)結(jié)合在一起,使得在設(shè)計高集成度、低成本和低功耗控制電路時具有更多的選擇。該系列主要用于對系統(tǒng)成本有嚴(yán)格要求,且系統(tǒng)具有高抗干擾性能的低功耗應(yīng)用領(lǐng)域,已廣泛用于電子陽性能表、IC卡水表、電子稱、消毒碗柜、LED顯示屏、煤氣表等工業(yè)控制領(lǐng)域。

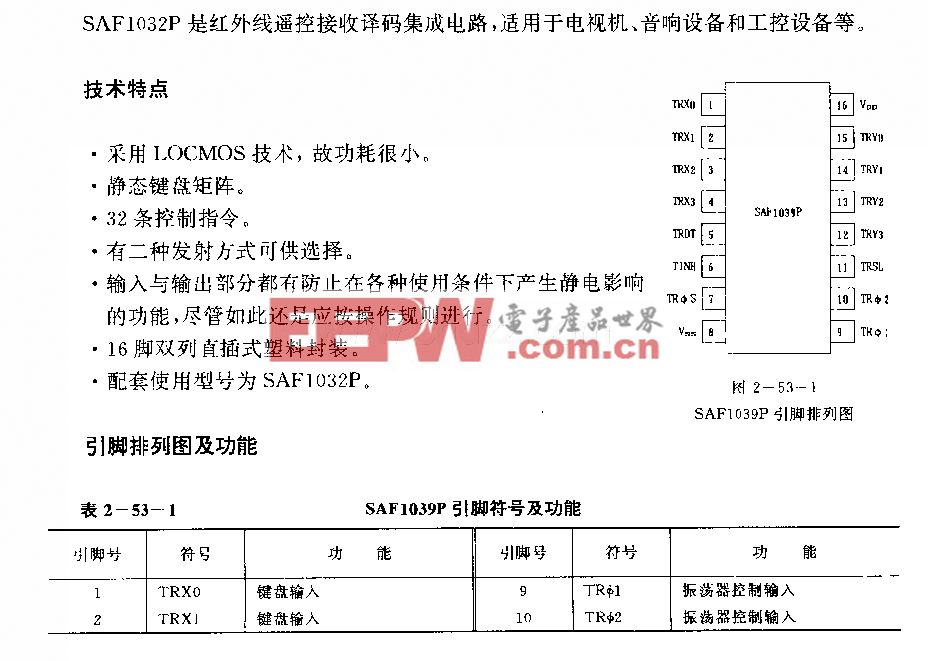
表1 P87LPC761引腳功能
| 引腳號 | 符 號 | 功 能 |
| 1 | P0.0/CMP2 | 比較器2輸出 |
| 16 | P0.1/CIN2B | 比較器2正向輸入B |
| 15 | P0.3/CIN1B | 比較器1正向輸入B |
| 14 | P0.4/CIN1A | 比較器1正向輸入A |
| 13 | P0.5/CMPREF | 比較器參考 |
| 11 | P0.6/CMP1 | 比較器1輸出 |
| 12 | VDD | 電源正端 |
| 4 | VSS | 電源負(fù)端 |
| 5 | X1/P2.1 | 振蕩放大器輸入 |
| 6 | X2/P2.0/CLKOUT | 振蕩放大器輸出 |
| 7 | SDA/INT0/P1.3 | I/C數(shù)據(jù)輸入/輸出 |
| 8 | SCL/T0/P1.2 | I2C時鐘輸入/輸出 |
| 3 | RST/P1.5 | 外部復(fù)位輸入 |
| 10 | P1.0/TXD | 串行口輸出 |
| 9 | P1.1/RXD | 串行口輸入 |
| 2 | P1.7 | 通用I/O口 |
2 原理
2.1 負(fù)載電壓的過零控制——單輸入檢測
方框圖1和2為該應(yīng)用的總體框圖。電路直接通過市電進行供電,相位控制時序取決于市電電壓過零檢測(Voltage Zero Crossing)(見圖1)或負(fù)載電流過零檢測(Current ZeroCrossing)(見圖2)。采用哪種檢測方式取決于實際應(yīng)用的情況。控制模塊計算機發(fā)時刻,LPC可直接吸收多個Triac的門電流。為了降低EMI,保證安全操作并控制相位,有必要在電流過零或一個特定的相位角時觸發(fā)Triac。對于阻性負(fù)載,電流和電壓過零是一致的;對于感性負(fù)載,電流滯后于電壓。負(fù)載的狀態(tài)決定了Triac是根據(jù)電壓過零還是電流過零進行可控硅的觸發(fā)。
檢測電壓過零最簡單的方法就是測量市電電壓極性的變化。LPC的+5V端連接到電源線(或中性點),而中性點(或電源線)通過限流電阻連接到任意一個I/O口。I/O口的電壓被內(nèi)部鉗位二極管鉗制0V和+5V之間,如圖3所示。微控制器可讀入輸入口的輸入狀態(tài),并且當(dāng)狀態(tài)從1變?yōu)?或從0變?yōu)?時,檢測到過電壓的過零點。電平跳變點取決于I/O口的模式(TTL或施密特觸發(fā)),過零點到檢測點的延遲時間取決于電源電壓的變化率(例如230V或110V系統(tǒng)), 這些都必須納入考慮范圍。該電路的優(yōu)點是簡單和成本低,因為僅需要一個額外的電阻(要求高耐壓值)并可使用LPC的任何一個I/O口。
這些都必須納入考慮范圍。該電路的優(yōu)點是簡單和成本低,因為僅需要一個額外的電阻(要求高耐壓值)并可使用LPC的任何一個I/O口。
2.2 電流過零檢測——電流過零窗口比較器
電流過零(CZC)是Triac的換流點。在非線性負(fù)載時,由于電流過零點和電壓過零(VZC)點不一致,CZC檢測尤其重要;但是,監(jiān)控CZC并不像監(jiān)控VZC那么容易,因為,通常檢測方式需要在負(fù)載上串聯(lián)一個電阻,這就分離了負(fù)載電路且浪費了電能。通常方法是通過放大和電平變換,然后和微控制器相連,這至少需要一個額外的運算放大器及其相關(guān)元件。LPC檢測電流過零采用了一種全新的方法:監(jiān)控Triac門極(VG)到陽極(T1)的電壓。VG-T1給出了Triac即將換流的一個信號,因為VG-T1在CZC時過零,根據(jù)負(fù)載電流和Triac的特性,VG-T1可低至0.1V或大于1.2V。如圖4所示電路,使用窗口比較器監(jiān)控該電壓即能完成CZC功能。圖4窗口比較器用于門電壓和電流過零檢測器,VG-T1相對于線電壓可正可負(fù),取決于負(fù)載電流的方向。也就是說VG-T1相對于VCC+5V而言可正可負(fù)。因此在LPC可監(jiān)控之前,必須通過R4和R5分壓,以使其低于VCC并處于比較器的操作電壓范圍,R1、R2和R3將電壓限制在過零點附近。
3 完整的LPC+Triac+Motor(AC)電路實現(xiàn)
在P87LPC761和Triac的控制應(yīng)用中,整個系統(tǒng)對電源消耗很低并具有高抗干擾性能,故可以通過阻容降壓和單相半波整流由市電直接供電,而不需要昂貴且體積大的變壓器,外部零件極少。此方案成本低。圖5所示是一個感性負(fù)載的通用電路,同時適合阻性負(fù)載。Triac可使用BTA216 600E。像圖4那樣,通過查詢P87LPC761的比較器來檢測負(fù)載電流過零,并重新觸發(fā)Triac。也可用中斷驅(qū)動。啟動電機時用電壓過零測量并觸發(fā)Triac的門級脈沖,以減少電磁干擾,并可從主循環(huán)的開始進行控制和重定義在啟負(fù)載之間軟件等待整個半周期。本例在復(fù)位后通過用戶按鍵開啟負(fù)載,通過按鍵可進行相角控制以控制電機的不同轉(zhuǎn)速。如圖5所示,LED發(fā)光管閃爍的快慢能體現(xiàn)電機轉(zhuǎn)速,LED閃爍越快電機轉(zhuǎn)動越快,反之則越慢;電機停轉(zhuǎn),LED熄滅。此電路稍經(jīng)修改就可以用于其它許多類似的場合。
源程序清單:
該軟件在Keil C51 V6.02上編譯通過,在目標(biāo)板上運動正常。如果用其它編譯器必須稍加修改。
#includereg761.h>
#define uchar unsigned char
#define uint unsigned int
uchar s,x,y=0;
void timer0(void)interrupt 1 using 1 {/*T0中斷服務(wù)程序*/
x=x+1;
if(x/10>s){
if(y= =0){P1=P10xfb; /*LED點亮*/
x=0;y=1;}
else {P1=P1|0x04; /*LED熄滅*/
y=0;x=0;}}
TF0=0;TH0=-(28/256);
TL0=-(28%256);
}
void speed(s){ /*電機轉(zhuǎn)換控制子程序*/
uchar pulsecount, pulseduration=0;
uint i=0;
uint j=0;
if (((CMP10x02))!(CMP20x02)/*查詢比較器*/
{for (i=0;is;i++)
{for(j=0;j210;j++) ;} /*延時觸發(fā)*/
CMP1=CMP10xfc;
CMP2=CMP20xfc;
pulsecount=1;
{P1=P10xfe;
pulseduration=12; /*觸發(fā)脈沖寬度*/
while(pulseduration){pulseduration- -;}
P1=P1|0x01;
pulsecount- -;
}
}
}
void Initcomparatior(void){ //初始化P87LPC761//
PT0AD=0x6f; /*禁止P0口的數(shù)字功能*/
P0=0xff;
P0M1=0x2a; /*P01,P03,P05設(shè)為高阻輸入*/
P0M2=0xd5; /*P00,P04,P06設(shè)為推挽方式*/
P1=0xff;
P1M1=0x82; /*P17用于VZC檢測*/
P1M2=0x05;
CMP1=0x34;
CMP2=0x34;
}
void main(void)
{uchar pulsecount ,pulseduration=0x00;
uint j;i=0;
SP=0x5f;EA=0;
TH0=-(28/256);
TL0=-(28%256);
TF0=0;EA=0;TR0=0;
ET0=1;CMP1=CMP2=0;
Initcomparator();
CMP1=CMP10xfc;
CMP2=CMP20xfc;s=0;
while(P1_1) {;}
while(!P1_1){;}
while(P10x80){};
while(!(P10x80)){};
while(P10x80){}
while(!(P10x80)){};
while(P10x80){};
P1=P10xfe; //啟動電機
while(1)
{if(P1_1= =0) {
x=0;
while (!x){;}
if(P1_1=0)
{P1=0xff;s=s+1;} //停止電機
if(s= =8){s=0;}
while(!P1_1){;} //等待釋放按鍵

while(!(P10x80)){};
while(P10x80)();
whie(!(P10x80)){};
while(P10x80){};
P1=P10xfe;} //啟動電機
EA=1;TR0=1;
speed(s); }
} //結(jié)束








評論