汽車ESP傳感器介紹及其接口技術分析

3.縱向/橫向加速度傳感器
ESP中的加速度傳感器有沿汽車前進方向的縱向加速度傳感器和垂直于前進方向的橫向加速度傳感器,基本原理相同,只是成90°夾角安裝。ESP一般使用微機械式加速度傳感器,在傳感器內部,一小片致密物質連接在一個可以移動的懸臂上,可以反映出汽車的縱向/橫向加速度的大小,其輸出在靜態時為2.5V左右,正的加速度對應正的電壓變化,負的加速度對應負的電壓變化,每1.0~1.4V對應1g的加速度變化,具體參數因傳感器不同而有所不同。
4.輪速傳感器
在汽車上檢測輪速信號時,最常用的傳感器是電磁感應式傳感器,一般做法是將傳感器安裝在車輪總成的非旋轉部分(如轉向節或軸頭)上,與隨車輪一起轉動的導磁材料制成的齒圈相對。當齒圈相對傳感器轉動時,由于磁阻的變化,在傳感器上激勵出交變電壓信號,這種交變電壓的頻率與車輪轉速成正比, ECU采用專門的信號處理電路將傳感器信號轉換為同頻率的方波,再通過測量方波的頻率或周期來計算車輪轉速。
最初的ESP系統中縱向/橫向加速度傳感器和橫擺角速度傳感器都是單獨實現的,現在基本都使用了傳感器總成(Sensor Cluster)的模式,將這3個傳感器設計為一體,通過CAN總線與ECU通訊。如圖3為SIMENS VDO公司和BEI公司生產的傳感器總成。

博世公司為了增加新的ESP功能和為了更好的控制整車的穩定性系統,如山地保持控制(HHC)和線控(SbW),提出了模塊化的HW和SW概念,開發了第三代高度靈活和低成本的慢性傳感器總成DRS MM3.x。
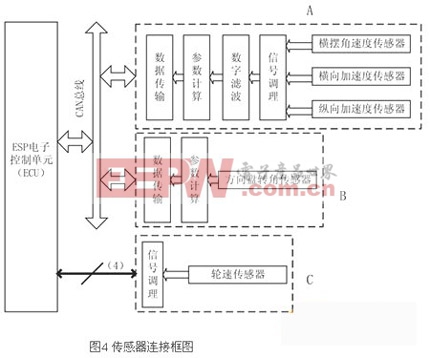
本文所作設計的框圖如圖4所示。在圖中,方向盤轉角傳感器信號經微控制器處理后,通過CAN總線發送給ECU(圖4中B);橫擺角速度傳感器、縱向/橫向傳感器由于信號特點和安裝位置類似,故設計在同一個模塊內(圖4中A);由于ESP對輪速傳感器信號的實時性要求較高,故經過信號調理后,直接送入ECU(圖4中C)。在圖4的A和B中,需要微處理器對信號進行處理并通過CAN總線傳送數據,本文選用Infineon公司的SAK-C164CI。該芯片是專為汽車應用而設計,內置AD轉換器、輸入信號捕捉、正交解碼器,運算速度快,非常適合ESP的傳感器信號處理。











評論