在消費電子設備中集成MEMS運動處理方案

多運動處理功能帶來了抗混疊挑戰,適合游戲應用的100赫茲低通濾波器對導航應用而言可能會產生過大的噪聲,而5赫茲低通濾波器對游戲來說因為截止頻率太低而可能會引發延遲。對于這些需要不同濾波器帶寬的應用,解決方法是使用滿足最寬帶寬要求的抗混疊濾波器,而使用可編程數字濾波器來適應對噪音有更嚴格要求的應用。
非集成運動處理方案(見圖3)可能需使用專用的微控制器,它連續地以100赫茲頻率采樣, 以截止頻率為5赫茲的數字低通濾波器進行濾波,并以10赫茲頻率輸出。該方案的缺點是微控制器帶來的額外成本,不適于成本敏感的消費電子應用。
圖3:使用多種運動傳感器實現的非集成方案,需要分立的固定頻率的低通濾波器。

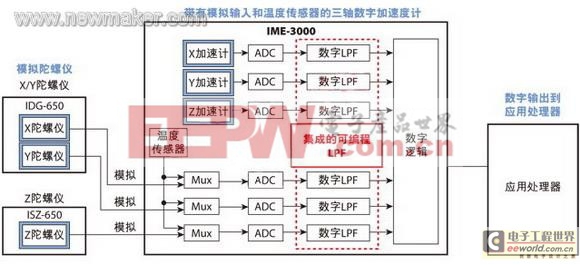
圖4:帶有可編程信號調理的集成運動處理方案,不再需要固定頻率的外部低通濾波器
陀螺儀角度是由采樣頻率與角速度測量結果決定的,同步精度直接影響陀螺儀角度的測量精度。下面的公式給出了角度測量結果與采樣速率和角速度之間的關系:

在當代手機中,加速度計與羅盤傳感器相結合只提供最基本的運動傳感功能(如傾斜傳感和絕對位置),所以,并不進行實時的傳感器數據整合,也不關注同步不準的問題。然而,隨著越來越多的手機配備多個傳感器(包括多軸運動處理系統所需要的陀螺儀),需要能在加速度計和陀螺儀之間提供預校準的同步計時功能從而省略微控制器的集成方案。例如,InvenSense六軸運動處理方案集成了三個直接與雙軸和單軸陀螺儀模擬輸出接口的高分辨率輔助ADC,以及針對多運動應用而提供抗混疊功能的內部可編程低通濾波器。
3:運動處理數據的同步
由于在手持消費電子系統中包含多運動傳感器,需保證傳感器數據采集同步進行,對于集成型運動處理方案來說,這是一個具有挑戰性的難題。同時采集加速度計和陀螺儀的數據可達到更高的精度,但是,如果各個傳感器有各自不同的計時要求,可能就需要進行插值運算,這將增加運動算法的復雜性。
多運動傳感器所使用的提取數據方法可能不同,比如,你可能通過I(SUP/)2(/SUP)C接口以特定的采樣頻率從數字加速度計收集數據,但這個數據通過系統微控制器內部的較低分辨率的ADC對模擬陀螺儀的輸出進行模數轉換,這兩個數據可能不匹配。緊密集成的六軸運動處理方案的優點是可確保所有的加速度計和陀螺儀的數據正確同步并以較低的設計復雜度來獲得更高的精度。
4:頻率要求
最后一個需要考慮的設計要點是,工程師必須確保陀螺儀的驅動器、傳感器和諧波頻率或任何其它成分的工作頻率不互相干擾,以便盡量減少傳感器融合輸出的失真。工作在5千赫以下并對聲音敏感的陀螺儀不能用在電視、視頻游戲、收音機、人類語言、警報器、汽車或聲響報警等音頻信號源附近。消費電子系統中使用的揚聲器通常工作在20赫茲到20千赫的范圍,OIS執行器工作在500赫茲到4千赫范圍,這些設備不會干擾InvenSense集成MEMS運動處理器的驅動頻率(X軸24千赫,Y軸27千赫和Z軸30千赫)。這些驅動和傳感頻率的選擇綜合考慮了各種干擾因素,確保它們之間不會互相干擾,同時避開了音頻頻率范圍和相機OIS執行系統的頻率范圍。
運動處理方案必須實現更高水平的集成,這里提出的設計要點可對全集成運動處理系統的選擇提供依據并消除把它整合到消費電子產品中的障礙。













評論