智能視頻監控系統及其在Blackfin上的應用

清華大學自動控制系的智能跟蹤算法采用單高斯背景建模的背景減除方法進行運動檢測,在目標分類階段,結合了基于運動特性的分類和基于形狀信息的分類兩種方法,利用人體、車輛的長寬比例、梯度直方圖和運動周期性等對運動物體進行分類。在對同類目標跟蹤時,采用基于區域的算法,判斷連續的各幀之間運動物體的質心位移方向和距離。基于上述三個階段的算法,系統還能實現人群跟蹤,入侵檢測,人、車數量統計,遺留物體檢測,攝像頭非法遮擋和移位報警等功能。
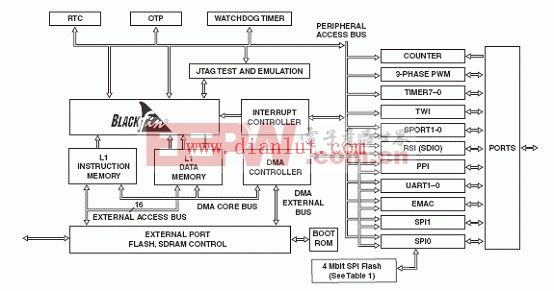
系統中,BF561的Core A用于實現H.264編碼算法,Core B用于智能視頻分析。Core A上同時運行uCos II操作系統以及RTP和TCP/IP協議棧。YUV4:2:2視頻幀通過PPI(并行外設接口)以DMA的方式傳送到SDRAM緩沖區。Core A和Core B共享幀緩沖區。Core B首先啟動memory DMA把視頻幀的Y(亮度)分量傳送到Core B的片內存儲區L1 SRAM的行緩沖區內。Core B對行緩沖區內的Y分量進行背景建模和后繼的運動檢測及目標跟蹤。如果可視區域內出現指定類型的物體,Core B向Core A發送一個中斷信號,Core A可以通過UART接口向本地控制臺發送告警信息,或者通過網絡接口向遠程控制臺發送告警信息;Core B還可以修改幀緩沖區,給目標加矩形邊框以標識目標。Core A也通過一個memory DMA接收來自幀緩沖區的視頻亮度和色度數據。編碼器對Core B處理后的幀緩沖區進行編碼。同時系統也可以通過另外一個PPI接口輸出經Core B修改后的幀緩沖區,實時顯示跟蹤結果。目標跟蹤算法是實時的,因此不會造成編碼的延時。在未檢測到運動物體時,編碼器可以工作在低碼率或低幀率狀態下,甚至不編碼。一旦檢測到指定類型的運動物體,編碼器即恢復正常工作,把壓縮碼流和對應時間通過以太網接口上傳到管理系統。這樣既能節約存儲空間,又能方便事后對視頻錄像的檢索。







評論