基于DSP的實時互相關測速系統設計與實現

摘 要: 根據相關測速原理,利用相關差值法的信號處理方法,設計一種基于DSP的非接觸式智能實時測速系統。系統采用模擬電路對紅外傳感器采集的模擬信號進行處理,利用DSP強大數據處理能力實現對信號數字化采集、運算處理和結果顯示等功能。實驗測試結果表明,系統測量誤差較小,結構簡單,穩定性高,抗干擾性強,測速范圍較寬。
關鍵詞: 速度測量;相關理論;峰值搜索;DSP
以往,速度測量系統普遍采用單片機和轉速傳感器相結合的結構,其穩定性和快速響應性較差。針對這一缺點[1],本系統利用信息相關理論結合電子技術來設計和開發測速裝置,可實現對任何運動物體速度的非接觸式測量,具有測量精度高、裝置電路簡單、成本低以及智能化等特點,因此可在汽車測速、產品檢測線測速和管道流量檢測等許多領域內得到廣泛應用[2]。
1 測速原理
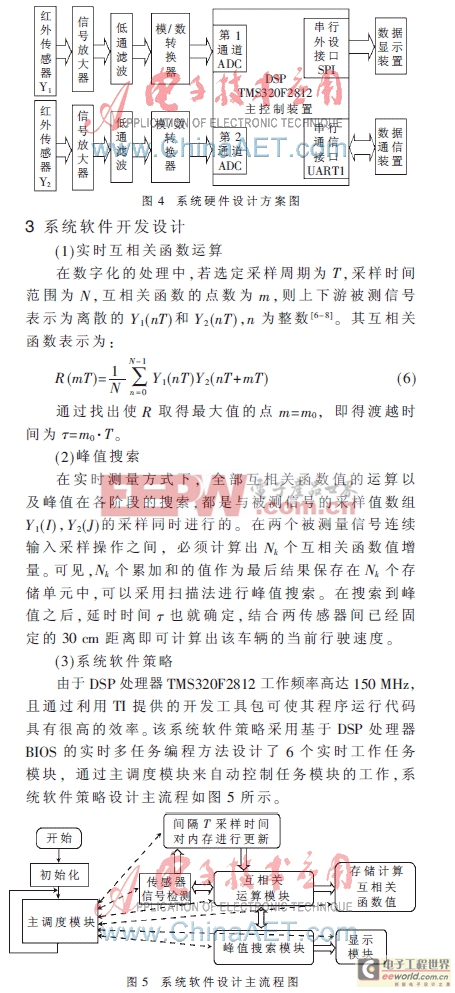
應用信息相關理論來測量物體運動速度的基本原理是:物體運動過程中,物體同一位置上的信息在不同時間依然保持相同的特性。通過在某時間內,利用對固定位置上的兩個信息采集點進行連續采集,所采集到的兩組信號具有相關特性[3]。對兩組信號進行相關運算,即可找出兩組采集信號的時間間隔,從而計算出該物體運動速度[4]。沿車輛運動速度方向,在車輛底部相隔一定距離安裝兩個傳感器Y1和Y2, 如圖1所示。通過Y1、Y2獲得車輛運動相對地面表面的特征信號Y1(t)和Y2(t),如圖2所示。
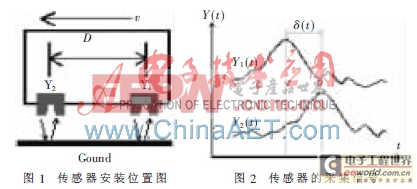
在上游傳感器Y1和下游傳感器Y2之間距離比較小的情況下(一般小于30 cm),可以近似認為車輛在D距離區間內勻速行駛。互相關信號Y1(t)和Y2(t)之間僅僅是一個運動車輛同樣的一點,通過上游傳感器Y1和通過下游傳感器Y2的時間延時δ(t),稱為“渡越時間”。通過互相關算法即可求得渡越時間δ(t),從而獲得目標車輛運動速度:
4 實驗測量結果
在實驗測試中,以電機轉盤線速度為標準速度值,利用該系統來實測電機轉盤線速度的顯示數據值和標準速度值對比,記錄測試實驗結果,如表1所示。
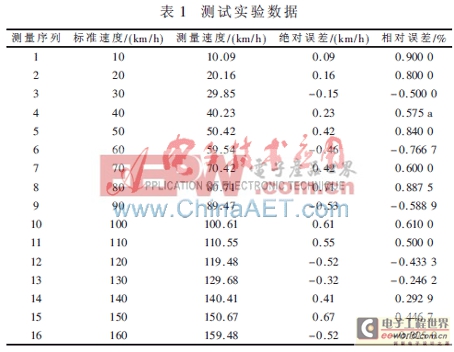
對實驗結果的分析表明,該系統測量的最大相對誤差為0.9%,小于1%。通過長時間對該系統的測試顯示,其工作穩定性強,可靠性高。
本文探討了利用信息相關理論,結合嵌入式DSP系統來設計和開發了車輛實時互相關測速系統。利用測速裝置實測電機轉盤線速度的實驗結果表明,本文提出的測速系統測速可達190 km/h,所提出的方案和具體實現方法是可行的,它能實現對任何運動物體線速度的非接觸式測量速度,其系統具有裝置電路簡單、成本低廉和智能化等優點。











評論