跳頻技術在GPS移動車輛監控系統中的應用

2.2 頻率合成技術
系統跳頻鎖定時間主要由鎖相環跳頻鎖定時間決定,對于半雙工電臺還得解決發射接收功放電路的切換時延問題。本系統采用全雙工電臺,頻率合成器采用日本富士通公司的MB1504,工作頻段為403~443MHz,參考頻率為fR=25kHz。
為了既考慮鑒相波紋的抑制能力,又要兼顧環路的瞬態特性,選取ξ≈0.707,ωn≤ωR/5。根據ξ、ωn及環路增益可唯一確定環路濾波器RC常數。考慮到增加PLL環路增益可以縮短環路鎖定時間,在環路濾波器之后,再增加一級集成運放。則鎖相環環路換頻鎖定時間tS可以按如下近似公式計算:
但實際電路中由于串行送數的局限和電路中分布參數的影響,tS為理論值的5~6倍左右,小于1ms。
2.3 跳頻同步技術
2.3.1 設計要求
對于跳頻通信,應保證以下三種同步:
(1)跳頻圖案同步,即跳頻接收機與發射機的跳頻圖案要求相互一致;
(2)載波同步,即發送信號載頻和接收本地信號載頻之差,應落在中頻帶通濾波器內;
(3)碼元同步,可分為跳頻碼元同步和信息碼元同步。
2.3.2 硬件設計
跳頻同步包括同步捕捉和同步跟蹤兩個過程。首先由捕獲過程保證跳頻圖案的同步,然后進行載波同步跟蹤和碼元同步跟蹤。
同步捕捉可利用GPS OEM模塊的高精度秒脈沖信號進行同步。秒脈沖信號的起點精度ΔTUTC可達±1μs,甚至為±50ns,其秒脈寬為100ms,上升沿是世界協調時UTC(Universal Time Coordinated)時刻。電路實現如圖3所示。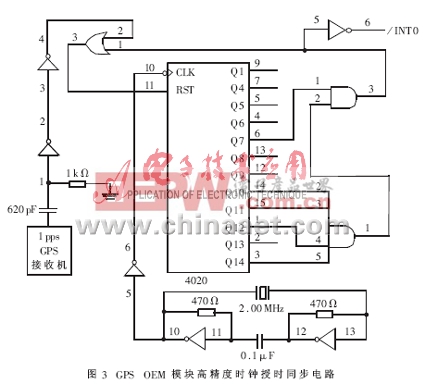
秒脈沖信號1PPS經微分電路得到窄脈沖秒信號,對分頻電路定時清零,從而做到本地的毫秒時鐘與UTC同步。分頻電路得到的周期為5ms的脈沖信號送往CPU的中斷/INT0,作為跳頻圖案同步信號。
跳頻速率為200hop/s,即跳頻時隙間隔Δt1為5ms;假設信息傳輸速率為100kb/s,即信息元寬度Δt2為10μs,則跳頻碼元同步時間誤差和信息碼元同步時間誤差分別為: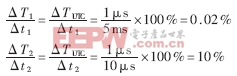
所以可以不加碼元同步跟蹤電路,而載波同步跟蹤則可以由鎖相環電路實現。
采用高精度時鐘授時同步組網有如下優點:在任一時隙中各用戶發射的是彼此互不相同的頻隙,不會相互干擾;可對抗敵方利用單一頻率的方法進行測向,因為在任一時隙中各用戶發射互不相同的所有頻隙。
3 GPS-AVL系統組網方案
網絡結構為兩級星形蜂窩跳頻(FH)通信系統,由兩個固定基站和八個移動基站組成,用以監控GPS-AVL系統的警車、運鈔車、消防車、救護車等近兩百部GPS移動車載單元。網絡拓樸結構如圖4所示。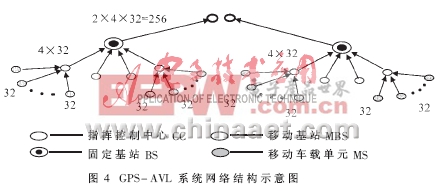













評論