基于uC/OS的嵌入式系統(tǒng)通信接口設計

1 引言
隨著微電子技術的不斷創(chuàng)新和發(fā)展,嵌入式系統(tǒng)已經(jīng)廣泛滲透到科學和技術的各個領域,如:工程設計、數(shù)碼產品、國防軍事、自動化控制領域。嵌入式系統(tǒng)是指將應用程序、操作系統(tǒng)與計算機硬件集成在一起的系統(tǒng)。它以應用為中心、以計算機技術為基礎,而且軟硬件可以裁剪,因而是能滿足應用系統(tǒng)對功能、可靠性、成本、體積和功耗的嚴格要求的專用計算機系統(tǒng)。
常用的主機與嵌入式外設的通信接口有RS232、USB、1394及10/100M以太網(wǎng)等接口。RS232接口被廣泛用于不同速度設備與主機通信,有使用廣泛,驅動程序豐富,可靠性好等優(yōu)點。
本文以一個已開發(fā)成功的手持嵌入式儀器的RS232通信接口作為實例,詳細說明了上位機和下位機通信程序的開發(fā)原理和過程,對類似的開發(fā)有很大的借鑒意義。
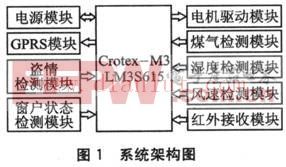
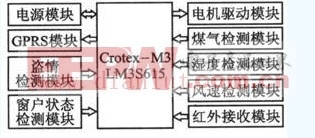
2 嵌入式通信系統(tǒng)結構
嵌入式處理器有許多種流行的處理器核,本文采用Piliphs公司的LPC2210,它是基于一個支持實時仿真和跟蹤的16/32位ARM7TDMI-S CPU。對代碼規(guī)模有嚴格控制的應用可使用16位Thumb模式將代碼規(guī)模降低超過30%,而性能的損失卻很小。
由于LPC2210的144腳封裝、極低的功耗、多個32位定時器、8路10位ADC、PWM輸出以及多達9個外部中斷使它們特別適用于工業(yè)控制、醫(yī)療系統(tǒng)、訪問控制和電子收款機(POS)。通過配置總線,LPC2210最多可提供76個GPIO。由于內置了寬范圍的串行通信接口,LPC2210也非常適合于通信網(wǎng)關、協(xié)議轉換器、嵌入式軟件調制解調器以及其它各種類型的應用。更詳細的資料見參考文獻[1]
500)this.style.width=500;" border=0>
3、嵌入式實時操作系統(tǒng)μC/OS-II的移植
對于大多數(shù)手持嵌入式儀器而言,采用公開源碼的操作系統(tǒng)μC/OS-II是最好的選擇,μC/OS-II是一個完整、可移植、可固化及可裁減占先實時多任務內核。代碼簡潔經(jīng)典,可靠性高。
μC/OS-II可以大致分為內核、任務處理、時間處理、任務同步與通信、與CPU的接口等五部分。內核(OSCore.c)是操作系統(tǒng)的處理核心,包括操作系統(tǒng)初始化、系統(tǒng)運行、中斷處理、時鐘節(jié)拍、任務調度和事件處理等多任務。任務處理部分(OSTask.c)是與任務操作密切相關的,包括任務的建立、刪除、掛起、恢復等。時鐘部分(OSTime.c)定義μC/OS-II的最小時鐘單位是Timetick(時鐘節(jié)拍)。任務同步和通信部分包括信號郵箱、郵箱隊列和時間 標志等部分,主要用于任務間的互相聯(lián)系和對臨界資源的訪問。與CPU接口部分是指μC/OS-II針對所使用的CPU的移植部分,主要包括中斷級任務切換的底層實現(xiàn)、任務級任務切換的底層實現(xiàn)、時鐘節(jié)拍的產生和處理、中斷和相關處理部分等內容。
μC/OS-II除了良好的穩(wěn)定性和安全性以外,很重要的特點就是對多任務管理的優(yōu)異表現(xiàn)。μC/OS-II可以管理多達64個任務。除了8個μC/OS-II自用的任務以外,用戶的應用程序最多可有56個任務。用戶可以通過系統(tǒng)提供的任務結構來自行創(chuàng)立任務。更詳細的資料見參考文獻[4]。
本實例就是通過創(chuàng)建通信任務來實現(xiàn)下位機的通信。代碼如下:
/* 創(chuàng)建任務receive */
OSTaskCreate(TaskUart0Recieve, (void *)0,TaskComStk[TaskStkLengh - 1], 20 );
4 嵌入式RS232通信軟件設計
軟件部分的設計包括上、下位機通信協(xié)議的制訂、上位機程序和單片機程序的編寫。其中上位機程序以Visual BASIC為開發(fā)工具,單片機程序用ANSIC C編寫。
4.1 上位機與下位機通信協(xié)議的制訂
上位機與下位機之間的數(shù)據(jù)交換必須遵循一定的通信協(xié)議,通信雙方才能按照該協(xié)議解析所傳輸?shù)臄?shù)據(jù)。就本設計而言,規(guī)定串口數(shù)據(jù)幀為1起始位,8個數(shù)據(jù)位,1個停止位,無奇偶校驗位,波特率為115200bps。
為了實現(xiàn)大文件的傳送,我們將文件切成塊,以二進制方式傳送,這樣就使得任意大小的文件都可傳送,并且對系統(tǒng)的資源消耗最小。所制訂的通信協(xié)議為:
幀頭為6個字節(jié),具體規(guī)定如下:
a.消息幀數(shù)據(jù)格式: 1 0 A B X X ,其中 10 為消息標識, AB表示文本長度, L=A*100+B, XX為配位字符,可以是任意值。
b.控制幀數(shù)據(jù)格式: 0 1 A B M N ,其中 01為控制標識, AB為請求標識, MN為附加標識, 11表示請求對方接收文件, M表示描述字串中文件名子串的長度, N表示描述字串中文件大小子串的長度, 10通知對方放棄傳輸, 00通知文件傳輸完畢, 01請求對方發(fā)送數(shù)據(jù), MN為10請求發(fā)送下一個, MN為00請求重發(fā)。
c.數(shù)據(jù)幀數(shù)據(jù)格式: 0 0 A B M N, 其中 00 為數(shù)據(jù)標識,, AB表示數(shù)據(jù)長度,L=A*100+B, MN為校驗,M*100+N=A+B。
前導幀使通信雙方保持同步,當PC機發(fā)送數(shù)據(jù)時,先將請求對方接收控制幀給下位機,收到應答幀后開始傳送;當PC機接收數(shù)據(jù)時,同樣地,先將請求對方發(fā)送控制幀給下位機,下位機收到幀后開始傳送。
4.2 上位機軟件的編寫
上位機是一個數(shù)據(jù)發(fā)送與接收的終端,上位機軟件的功能是:使計算機與嵌入式系統(tǒng)能夠通過RS232接口標準收發(fā)數(shù)據(jù)。由于Visual BASIC是一種易學易用的面向對象的程序設計工具,因而采用它來編寫上位機程序。在上位機程序中要能夠對計算機串行口的硬件進行操作。本設計通過串行通信組件MsComm實現(xiàn)串行通信功能。在設計中還需要使用其它一些組件如CommandButton、TextBox、CommonDialog等來完成軟件界面的設計。界面如下:
500)this.style.width=500;" border=0>
4.3 下位機程序設計
通信任務代碼如下:
/*******************************************************************
** 函數(shù)名稱: TaskUart0Recieve
** 功能描述: μCOS-II的任務。從UART0接收并處理數(shù)據(jù)。通信調度程序!
** 輸 入: pdata 任務附加參數(shù)(指針)
** 輸 出: 無
*******************************************************************/
void TaskUart0Recieve(void *pdata)
{ uint8 bytTest[6];
uint32 i, intTest;
char strReceive[100];
pdata = pdata; /* 避免編譯警告 */
for (;;)
{ for (i = 0; i 6; i++)bytTest[i] = UART0Getch();/* 接收數(shù)據(jù)幀頭6Byte */
if((bytTest[0] == 1)(bytTest[1] == 0)){ //收到信息幀
intReceiveLen = bytTest[2] * 100 + bytTest[3];
for (i = 0; i intReceiveLen ; i++)strReceive[i] = UART0Getch();
}
else if(( bytTest[0] == 0)( bytTest[1] == 1)) //收到控制幀
{intTest = bytTest[2] * 100 + bytTest[3]; //控制幀分析
switch(intTest)
{ case 101: //對方請求接收新文件
intReceiveLen = bytTest[4];
i = 0;
do{strFileName[i++] = UART0Getch(); //'接收文件名信息
}while (i intReceiveLen);
intReceiveLen = bytTest[5];
i = 0;
do{strReceive[i++] = UART0Getch(); //接收文件長度信息
}while (i intReceiveLen);
intFileLenth = atol(strReceive); //文件長度
FileReceiveManager(0); //receive
break;
case 100:break; //對方通知放棄傳輸
case 1: //對方請求發(fā)送數(shù)據(jù)
if( bytTest[4] == 1){ //請求發(fā)送數(shù)據(jù)包
intDataNumber++;
if (intDataNumber >= intDataCount)
FileSendManager(4); //發(fā)送完成信號
else
FileSendManager(1); //發(fā)送新一幀數(shù)據(jù)
}
else
FileSendManager(2); //重發(fā)上一幀數(shù)據(jù)
break;
case 0: //接收到傳輸完畢信號
FileReceiveManager(4);
break;
}
}
else if( (bytTest[0] == 0)(bytTest[1] == 0)) //收到數(shù)據(jù)幀
{intTest = bytTest[4] * 100 + bytTest[5];
intReceiveLen = bytTest[2] * 100 + bytTest[3]; //數(shù)據(jù)字節(jié)數(shù)
i = 0;
do{ b_char[intFileReceiveLenth + i++ ] = UART0Getch();// 一幀數(shù)據(jù)
}while (i intReceiveLen);
if(intTest == (bytTest[2] + bytTest[3])) //根據(jù)校驗和作出響應
FileReceiveManager(1); //校驗和正確請求發(fā)送新數(shù)據(jù)
else
FileReceiveManager(2); //校驗和錯請求重新發(fā)送
}
else if( (bytTest[0] == 1)(bytTest[1] == 1)) //發(fā)送數(shù)據(jù)到PC
FileSendManager(0); //發(fā)數(shù)據(jù)
}
} /* 關于UART0Getch() 請參看參考文獻[2] */
/* 文件發(fā)送管理 void FileSendManager(uint32 intFlag) 根據(jù)接收端的請求發(fā)送文件 */
/*文件接收管理void FileReceiveManager(uint32 intFlag) 處理接收到的文件數(shù)據(jù) */
以上兩函數(shù),限于篇幅,具體代碼略。
5 結束語
本文闡述了嵌入式系統(tǒng)的概念及嵌入式通信系統(tǒng)的結構。在設計中,作者充分地發(fā)揮了uC/OS-II的多任務管理功能,為實現(xiàn)通信功能而單獨分配了一個優(yōu)先級較低的任務,使得下位機在與主機通信的同時,能繼續(xù)自己的工作,真正實現(xiàn)了實時多任務;此外,為了實現(xiàn)大文件的傳送,我們將文件切成塊,以二進制方式傳送,這樣就使得任意大小的文件都可傳送,并且對系統(tǒng)的資源消耗最小,對于嵌入式系統(tǒng),這是很有意義的。最后,為了便于參考,給出了在一個裁剪的uC/OS-II操作系統(tǒng)環(huán)境下,實現(xiàn)系統(tǒng)與主機通信的下位機程序源碼。
參考文獻:
[1] LPC221016/32-bit ARM microcontroller with 10-bit ADC and external memory interface Rev. 01 — 09 February 2004 ,Philips Semiconductors
[2] ARM嵌入式系統(tǒng)實驗教程(二),廣州周立功單片機技術有限公司,2005.
[3] 劉承廣,常宇健,楊衛(wèi)東,施博學. uCOS-II在車載GPS移動終端中的應用.
微計算機信息(旬刊).2005;21(2):103-104
[4] Labrosse Jean J. 嵌入式實時操作系統(tǒng)μC/OS-Ⅱ. 邵貝貝譯. 第2版. 北京:北京航空航天大學出版社, 2003
作者簡介
羅永道,1969.9,男,漢,北京理工大學 光學工程專業(yè) 在讀博士
EMail : lyd@bit.edu.cn
羅 徽,1972.7,男,漢,昆明理工大學 計算機應用專業(yè) 在讀碩士;
廖寧放,1960.1,男,漢,教授,博士生導師 北京理工大學
通信地址:北京市海淀區(qū)中關村南大街5號 北京理工大學 信息科學技術學院顏色科學與工程國家專業(yè)實驗室 郵編:100081

數(shù)字通信相關文章:數(shù)字通信原理
通信相關文章:通信原理




評論