基于激光測距的車輛寬高檢測系統設計

LM3S8962具有兩個串行接口UART0和UART1。本系統選用UART1用于RS232通信使用。UART是一種應用廣泛的短距離串行傳輸接口,通信雙方只要采用相同的幀格式和波特率,僅用兩根信號線(Rx和Tx)就可以完成通信過程,有獨立的發送FIFO和接收FIFO。有可編程的波特率發生器,允許速率高達460.8 kb/s。系統中通過UART傳送的數據高速存儲于SRAM存儲器內供微控制器進行實時快速計算。
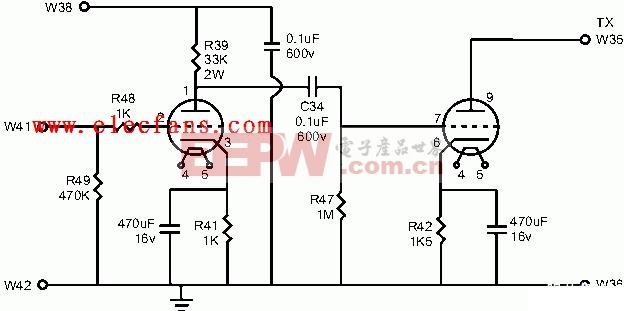
3.3 輸入輸出模塊設計
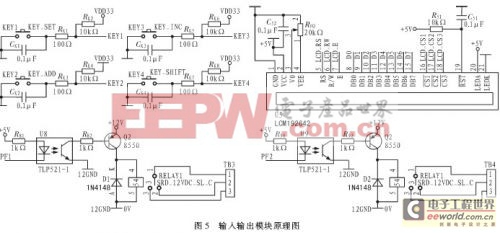
系統設置了4個按鍵,用于設置車輛的限寬限高值,設置及修改系統時間等,實現了隨時修改信息的功能。為了便于工作人員查看過往車輛的寬度和高度,采用了LCD顯示。選用青云創新公司生產的LCD液晶顯示模塊LCM192642,它是漢字圖形點陣液晶顯示模塊,可顯示漢字和圖形。模塊工作電源為5 V;改變變位器W1的值可以調節LCD屏的顯示對比度;整個LCD屏被均分為三部分16~18是選屏信號線,可以選擇其中任一部分顯示。系統中設置了2個12V繼電器,當行駛車輛經檢鍘超過了標準的寬度和高度時系統會通過繼電器分別接通警燈和室外擴音器的電源而產生聲光報警,一方面提示現場工作人員進行處理,另一方面告知司機該車超限需停車接受處理。如下圖5所示為輸入輸出模塊原理圖。
4 系統軟件設計
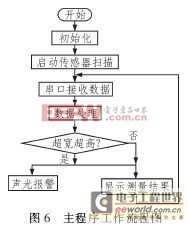
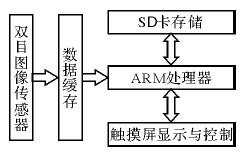
本系統采用LAR5.11作為開發環境,使用C語言編程,采用模塊化程序設計。軟件設計分為主控模塊、初始化模塊、中斷處理模塊、數據發送和接收模塊、數據處理模塊、鍵盤和顯示模塊等幾部分。主程序工作流程圖如圖6所示。系統上電后,首先完成系統初始化,然后給傳感器發命令,啟動傳感器掃描,接收串口發來的數據,從串口緩沖區提取所需數據,根據數據信息進行轉換,判斷,比較,存儲。進行數據分析處理后調用相應的執行子程序完成相應的功能,如調用LCD子程序顯示車輛寬高信息等,程序進入不斷循環工作狀態。
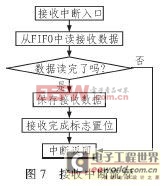
數據采集使用串口通訊模式,發送數據采用查詢方式完成,接收數據采用中斷方式完成,接收中斷流程如圖7所示。傳感器和主控制器之間通過事先約定的通訊協議進行數據收發,主控制器只需設置好相應的串口號、波特率及相應端口設量,發送測量命令,等待接收。單次讀數據命令為:RNLMDscandatata;連續讀數據命令為:EN LMDscandata1;連續停數據命令為:EN LMDscandata0。
5 模擬實驗
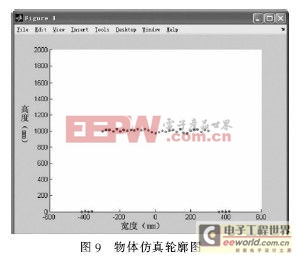
系統整體設計完成后,在進入超限點進行現場調試之前,在實驗室進行了模擬實驗。將激光傳感器固定在3 m高的支架上,讓一放置立方體被測物的小推車以10km/h的速度從激光傳感器下經過,如圖8所示。將激光傳感器設置在掃描角度為0°~180°,角度分辨率為0.5°的模式下,當小推車完全經過時,液晶屏上即可顯示立方體被測物的最大寬度和高度,同時可通過MATLAB仿真物體的輪廓,如圖9所示。同等條件下,讓小推車在傳感器下先后通過數次后統計結果,將測量值和實際值比較可得誤差在0.15m以內的達到95%,符合測量精度要求。

6 結束語
針對高速公路車輛超限超載這一問題,設計了基于激光測距技術的寬高檢測系統,可實現對行進車輛進行實時動態測量。本系統在實驗期間,工作可靠穩定,功耗低,計算速度快,測量精度高,抗干擾能力強,實驗誤差符合高速公路管理部門對于行進車輛寬高超限檢測的要求。通過反復實驗驗證,該設計有效可行,為下一階段進入現場進行實地調試作了充分準備。





評論