基于Modbus通訊協議的RS-485總線在配電自動化控制系統中的應用

引言
隨著輸配電自動化程度越來越高,傳統的輸配電操作和控制方式已不再適應當今的發展要求,自動化控制系統得到越來越多的運用。RS-485因硬件設計簡單、控制方便、成本低廉等優點廣泛應用于工廠自動化、工業控制等領域。因此針對當前輸配電行業的設備現狀和發展需要,本文將介紹一種基于Modbus通訊協議的RS-485總線技術進行通信的智能斷路器控制系統。
控制系統整體結構
基于RS-485總線的配電自動化控制系統由智能斷路器、監控計算機和RS-485控制網絡3部分構成。
智能斷路器是直接面向運行現場的智能節點,其核心控制器件智能控制器主要功能是采集現場電流、電壓、頻率及功率因素等數值,按照一定的控算方法對配電控制回路的斷路器進行控制操作;將現場檢測到的電流、電壓、斷路器分合閘狀態等信息通過RS-485總線通信網絡傳送至監控機,并實時處理監控機下傳的遙控分/合閘等各種命令。
監控計算機的主要功能是對現場智能節點的運行參數進行實時檢測,獲得現場運行數據,監測系統狀態異常,并根據故障信息發出相應的報警信號;以友好的圖形界面直觀指示當前各智能斷路器的運行狀況及參數信息;實現故障記錄管理,并實現遠程控制智能斷路器分/合閘功能。
RS-485控制網絡部分主要由RS-485通信接口、通信介質、接口電路、Modbus通訊協議及相應的通信軟件組成。RS-485通信接口實現智能節點與監控計算機之間的串行連接;Modbus通訊協議制定了消息域格局和內容的公共格式,為智能節點與監控計算機之間提供通信規約;通信介質為雙絞線,負載連接在A、B線之間。
為了深入說明RS-485總線接口在輸配電自動化系統中的應用,本文以浙江正泰電器股份公司生產的NST1-H智能控制器為例,簡要介紹該智能控制器的總體設計,并給出實現RS-485通信的硬件電路和軟件。
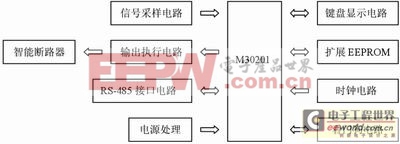
圖1 智能控制器結構框圖
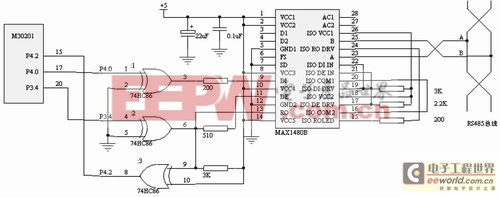
圖2 智能控制器RS-485通信接口電路
現場智能節點
智能控制器在自動控制系統中需完成現場數據采集和處理、控制器各執行器件的控制及與遠程監控計算機之間的通信等主要工作,因此智能控制器的設計是整個系統的關鍵部分。其結構框圖如圖1所示。
考慮到可靠性、性價比等因素,智能控制器CPU采用三菱系列單片機M30201。智能控制器設計采用結構化設計方法,包括四大部分:RS-485通信接口電路部分、電源管理部分、信號輸出執行部分、I/O接口部分。其中I/O接口部分包括現場數據采集、鍵盤輸入與顯示和執行器的控制信號輸出等工作。
在某些工業控制領域,由于現場情況十分復雜,各個節點之間存在很高的共模電壓。雖然RS-485接口采用的是差分傳輸方式,具有一定的抗共模干擾的能力,但當共模電壓超過RS-485接收器的極限接收電壓,即大于+12V或小于-7V時,接收器就無法正常工作,嚴重時甚至會燒毀芯片和儀器設備。為消除此問題,增強智能控制器在通信中的抗干擾能力,本設計采用二次集成芯片MAX1480進行信號隔離,接口電路如圖2所示。
本設計的異步通信數據以字節的方式傳送,在每一個字節傳送之前,先要通過一個低電平起始位實現握手。為防止干擾信號誤觸發RO(接收器輸出)產生負跳變,使接收端MCU進入接收狀態,在RO引腳外接3k繳俠繾瑁籔3.4與DE引腳之間通過74HC86實現反相控制,以防止MCU上電時對總線的干擾。
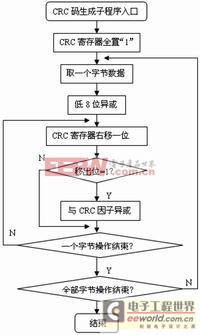
圖3 CRC校驗碼生成流程圖
Modbus通訊協議及編程
本設計采用Modbus通信協議的RTU通訊模式,消息發送至少要以3.5個字符時間的停頓間隔開始。網絡設備不斷偵測網絡總線,包括停頓間隔時間內。當第一個域(地址域)接收到,每個設備都進行解碼以判斷是否發往自己的。一個典型的消息幀為:起始位 設備地址 功能代碼 數據 CRC校驗 結束符。監控計算機通過將要聯絡的智能控制器的地址放入消息中的地址域來選通智能控制器。當智能控制器發送回應消息時,它把自己的地址放入回應的地址域中,以便監控計算機知道是哪一個設備做出回應。地址0是用作廣播地址,以使所有的智能控制器都能認識。當消息從監控計算機發往智能控制器時,功能代碼域將告之智能控制器需要執行哪些行為。在這里主要使用到2種功能碼,03H:讀寄存器數據;06H:寫寄存器數據。讀寄存器的內容包括開關分/合閘狀態、當前電流值、電壓值、故障記錄值等。智能控制器回應時,它使用功能代碼域來指示是正常回應(無誤)還是有某種錯誤發生(稱作異議回應)。對正常回應,智能控制器僅回應相應的功能代碼。對異議回應,智能控制器返回一等同于正常代碼的代碼,并將功能代碼首位置為邏輯1。例如:一從監控計算機發往智能控制器的消息要求讀一組保持寄存器,將產生如下功能代碼:0 0 0 0 0 0 1 1對正常回應,智能控制器僅回應同樣的功能代碼。對異議回應,它返回: 1 0 0 0 0 0 1 1除功能代碼因異議錯誤作了修改外,智能控制器將一獨特的代碼放到回應消息的數據域中,監控計算機應用程序得到異議的回應后重發信息,直到智能控制器能夠正確響應;通過寫寄存器可實現開關遙控分/合閘控制及更改智能控制器系統參數等功能。在最后一個傳輸字符之后,一個至少3.5個字符時間的停頓標定了消息的結束,一個新的消息可在此停頓后開始,如果停頓時間小于3.5個字符時就會引起CRC校驗錯誤。在程序中設置一個幀計時器,當線路上有數據時就刷新該計時器,線路空閑時則停止刷新,計時時間達到3.5幀時計時器被軟件清除,而下一幀則為地址幀。
由于Modbus編程主要需處理好CRC校驗碼的生成及數據包開始標志的測試,圖3給出CRC校驗碼的生成流程。
結語
Modbus協議是目前得到廣泛應用的通信協議,而其構筑的硬件平臺RS-485總線具有硬件設計簡單、控制方便、成本低廉等優點,在工控自動化系統中將得到越來越多的應用。




評論