LIN總線技術在汽車門控系統中的應用

動力和車速已經不再是消費者對汽車性能的唯一追求,人們越來越關心駕車時的舒適感、安全保障、功能的易用性,和對環境的保護等方面。因此,除了車身系統(Carbody)和傳動系統(PowerTrain)等傳統的汽車控制單元以外,安全系統(Safety)和車載資通娛樂系統(Telematics/Infotainment)也隨著電子技術的進步而逐漸成熟。
現代的汽車電子系統中,電子控制組件(ECU)因在上述系統中賦予汽車更高效和更具智能性的操控能力而扮演了重要角色,也實現了諸如電源、車燈和門窗等自動檢測功能,給駕駛提供了更大便利。
汽車中的電子系統和組件平均達到80多個,它們之間越來越復雜的連接和通信功能對總線技術提出了需求。車燈、發動機、電磁閥、空調等設備的傳統連接方式為線纜連接,而如果電子元件之間也用電纜連接則必然造成連接復雜性的提高、可靠性的下降,和整體重量的上升;此外,伴隨而來的線纜的磨損和老化現象也將使汽車的安全性能降低。
為避免線纜帶來的各種麻煩,車載網絡(In-VehicleNetwork)中應用標準化總線技術則成為較理想的解決方式。按不同的技術特點和應用領域,車載總線技術可分為五類。如表一所示,第一類LIN、TTP/A等總線傳輸速度最低,適用于車體控制;第二類中速總線,如低速CAN、SAEJ1850、VAN(VehicleAreaNetwork)等,適用于對實時性要求不高的通信應用;第三類包括高速CAN、TTP/C等技術,適用于高速、實時死循環控制的多路傳輸網絡;第四類如IDB-C、IDB-M(D2B、MOST、IDB1394))、IDB-Wireless(Bluetooth)等,一般應用于車載資通娛樂網絡;第五類傳輸速度最高,用于最具關鍵性、實時性最高的人身安全系統,包括FlexRay和Byteflight等。
本文將主要討論LIN總線技術規格及在門控系統中的應用實例。
表一 車載網絡總線標準

LIN技術概況
LIN總線全稱為區域互連網絡(LocalInterconnectNetwork),是一種結構簡單、配置靈活、成本低廉的新型低速串行總線,和基于序列通訊協議的車載總線的子集系統(Sub-busSystem)。
LIN總線為主從節點構架,即一個主節點(MasterNode)最多可支持16個從節點(SlaveNode);在從節點中不用晶振(CrystalOscillator)或陶瓷諧振器(CeramicResonator)時鐘,也能做到自同步性。LIN基于UART/SCI接口協議,可實現極低的軟硬件成本;其信號傳播時間可預先計算,以滿足傳輸的確定性。總線電纜的長度最多可以擴展到40米左右,數據傳輸率可達20kbps。
1999年,LIN1.0版推出后,不斷有新版本出現(LIN1.3、LIN2.0),持續改進了LIN總線的性能與適用性。美國汽車工程師協會(SAE)下屬的車輛架構任務組(TaskForce)也基于LIN2.0提出J2602規范,此舉讓LIN從節點所需要的軟件代碼長度縮短,進一步降低了LIN2.0中軟件單元的復雜性,可實現更高效的系統配置。此外,主流廠商也會針對LIN的性能推出改進版本或技術,例如意法半導體的LINSCI。
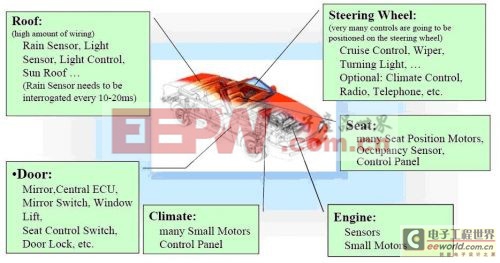
圖一 LIN總線應用領域
LIN主要用作CAN等高速總線的輔助網絡或子網絡,能為不需要用到CAN的裝置提供較為完善的網絡功能,包括空調控制(ClimateControl)、后視鏡(Mirrors)、車門模塊(DoorModules)、座椅控制(Seats)、智能性交換器(SmartSwitches)、低成本傳感器(Low-costSensors)等。在帶寬要求不高、功能簡單、實時性要求低的場合,如車身電器的控制等方面,使用LIN總線可有效的簡化網絡線束、降低成本、提高網絡通訊效率和可靠性。
LIN網絡架構
如上文所述,LIN網絡基于主從節點構架而形成網絡拓撲結構。主節點需要向從節點發出周期性的檢測信號,檢測結果由從節點反饋給主控制器。其中周期根據事件檢測的實時性要求而設定。
如圖二所示,LIN的信號由一個由主任務提供的標頭(Header)和由從任務處理的響應部分(Response)構成。標頭包含一個13位的同步間隔字段(SynchBreakField)、一個由主任務產生的同步字段(SynchField),以及一個辨識字段(IdentifierField)。其中每一個字節字段都以串行位元組方式發送,起始位的第一位為“0”,而終止位為“1”。由主任務執行的信號標頭會依整個LIN叢集的進度表決定每個信號的傳輸時間,以確保數據傳輸的確定性及避免網絡超載的危險。在LIN網絡中只有主節點采用晶體振蕩器來為系統提供精確的基本時鐘,此時鐘會嵌入上述的同步字段中,讓從任務能與主節點時序同步。LIN信號的響應部分包含一個數據域位(DataFiled),長度為2/4/8個字節,和一個長度為一個字節的驗證字段(ChecksumField)。
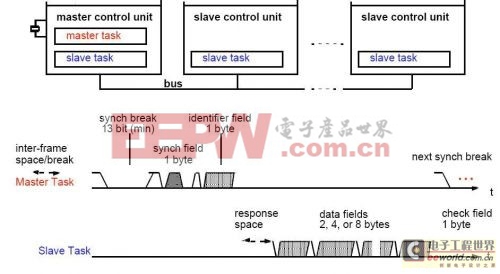
圖二 LIN信號結構示意圖









評論