車輛勻速直線運動模型:
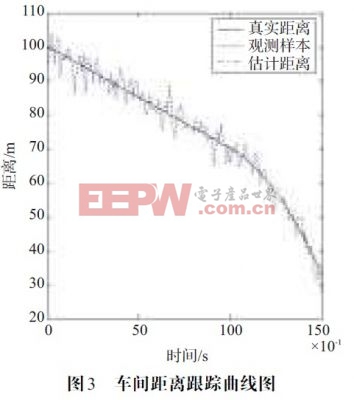
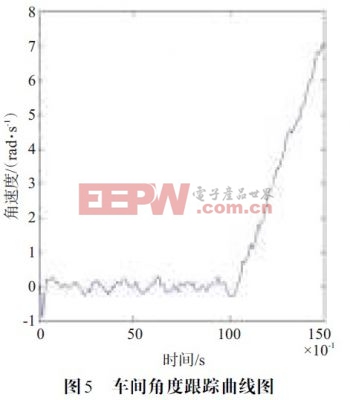
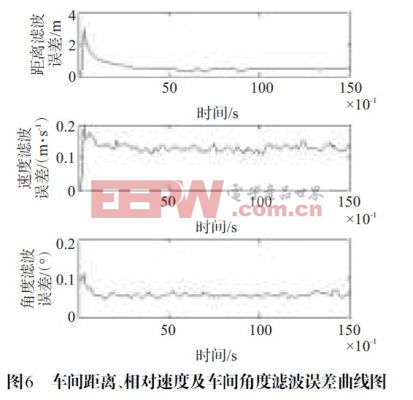
采用蒙特卡洛方法對跟蹤濾波器進行仿真分析,仿真次數為400 次。以下運用Matlab7.0 仿真的結果。
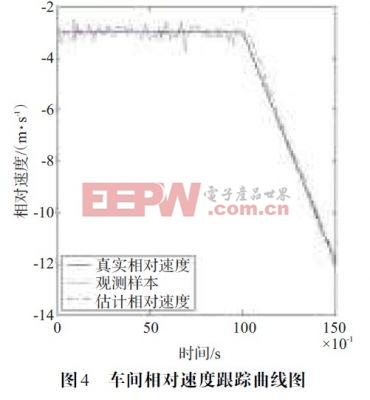
由圖3~圖6 仿真結果表明,該算法能夠有效地跟蹤前方車輛的運動信息,并且誤差較小,精度較高。
5 總結
重點研究了交互多模型機動目標跟蹤算法在車載毫米波雷達防追尾預警系統中的應用,介紹機動目標跟蹤算法原理和步驟,并以高速公路上行駛的汽車為對象進行防真,結果表明算法具有結構簡單、運算量小、精度較高的優點,能夠提高車載雷達防追尾預警系統的使用效率,從而提高車輛駕駛的安全性,具有一定的應用價值。


評論