機動目標跟蹤算法在車載毫米波雷達防追尾系統中的應用

IMM算法可歸納如下4 個步驟。
步驟1 輸入交互:
根據兩模型(k-l)時刻的濾波值和模型概率,計算交互混合后的濾波初始值,包括模型1 的濾波初始值:濾波估計值X 01
(k - 1)和估計協方差μ1(k - 1);模型2 的濾波初始值:濾波估計值X 02
(k - 1)和估計誤差協方差P02
(k - 1)。設系統在(k-1)時刻模型1 概率為μ1(k - 1),濾波值X1
(k - 1),估計誤差協方差為P2(k - 1)。模型2 的概率為μ2(k - 1),濾波值為X 2
(k - 1),系統估計誤差協方差為P2(k - 1)。則進一步推廣到r 個模型,交互后r模型的濾波初始值為:

步驟2 模型條件濾波:
對應于模型Mj(k),以X 0j
(k - 1|k - 1),P0j(k - 1|k - 1)及Z(k)作為輸入進行卡爾曼濾波。
卡爾曼預測方程:

i = 1rΛj(k)cj_,而Λj(k)為觀測Z(k)的似然函數:

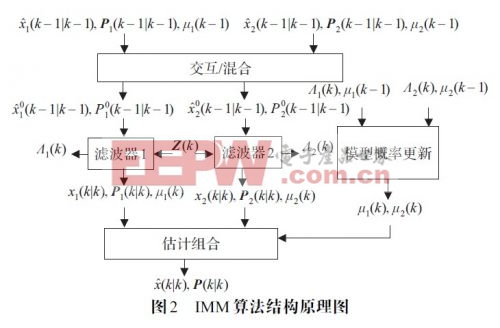
圖2 為IMM算法結構原理圖
4 車輛運動模型分析與IMM算法跟蹤仿真
試驗設計:考慮兩輛車在道路上同向行駛,在0~10 s 時,兩車均保持勻速直線運動,由安裝在后車上的車載毫米波雷達檢測出與前車的距離為100 m,相對速度為-3 m/s,方位角2°。
在10~15 s 時,前車向右偏轉,與后車的相對角加速度為1° s2。
后車加速,與前車的縱向相對加速度為a = -1.8 m/s2。雷達的掃描周期為T=0.1 s,系統噪聲為σα = 0.3 m/s,σβ = 0.3°/s。量測誤差為σ1 = 1 mσ2 = 0.5 m/sσ3 = 0.2°/s。

評論