淺論六軸機器人在機床上下料中的應用

整套設備組成:
1、X軸:采用Roboworker品牌的一根加強型RSL300直線運動單元,齒輪齒條傳動,其有效行程12米。RSL300安裝到機器人支架上。
2、Y軸:采用X軸同樣的直線運動單元,其有效行程500mm。
3、Z軸:作為上下運動軸,它是一根獨立的RSL300直線運動單元,Z軸安裝到Y軸一端,隨XY同時水平運動,但可獨立上下運動,其有效行程1.4m,額定提升力300公斤。
4、3個旋轉軸:采用精密減速機和伺服電機,可以任意角度旋轉。
5、手爪:主要由Festo氣缸帶動手指運動。
6、下料傳送帶一條,上料工作臺一個,桁架和防護。
7、控制系統1臺;
三、從工裝A到工裝B的工作過程
本項目中最大的難點之一是如何把工裝A上的排氣管取下,經A軸和C軸的各自轉動及B軸的擺動后裝到工裝B上。這里還有考慮機床內部空間對手爪運動軌跡及空間的限制。
具體工作過程是先用手爪從A工裝抓取工件,然后順著A工裝方向取下排氣管。排氣管離開A工裝后,被按到B工位的方向。然后手爪按B工裝的導向柱把排氣管安裝到B工裝上。圖4給出了這一簡單過程。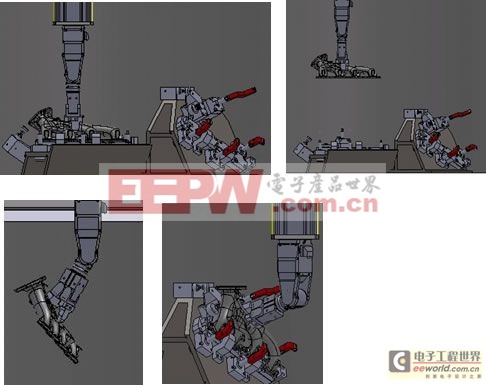
圖4:左上圖表示從工裝A上抓住排氣管。右上圖表示把排氣管取下后升高及轉動。左下圖表示排氣管被調整到與工裝B要求的方向。右下圖表示把排氣管按55.8度方向裝到工裝B上。
四、結論
對于這類加工中心上下料任務采用傳統的直角坐標機器人是無法完成的。就算在Z軸上加兩個旋轉軸也沒法完成工件的方位變化。而采用軌道加關節式機器人可以完成這類任務,但其占地空間大,采購和維護成本非常高。而沈陽萊茵機器人有限公司開發的這張混合型六自由度機器人結合了直角坐標機器人和關節機器人的優點,非常適合這類上下料任務。此為混合型六軸機器人還非常適合冷沖上下料,大型零件的焊接和切割等復雜任務。目前我公司已開發幾款混合型直角坐標機器人,它們有非常廣闊的應用前期。

伺服電機相關文章:伺服電機工作原理
評論