低附著路面的彎道制動控制策略研究

3 仿真結果
根據建立的數學模型,利用Simulink建模仿真。仿真車輛質量為6 750 kg,左右輪距2.05 m,質心至前軸的水平距離為2.26 m,質心至后軸的水平距離為3.24 m,車輪半徑為0.62 m。車輛以45 km/h的初速度、轉向輪5°,在摩擦系數為0.45的濕滑路面制動時進行仿真,仿真結果如圖4所示。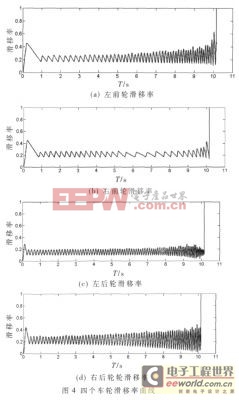
從圖4可以看出,汽車除在制動初始階段滑移率較大外, 其他時間都較平穩, 達到了預期的控制效果。圖5對比了原ABS 與改進控制算法的ABS 在彎道制動中橫擺角速度的情況。表明車輛在改進算法后, 橫擺角速度變化幅度明顯變小, 說明制動穩定性更好。
動力學仿真分析表明,本文采用控制方法改進ABS后,車輛在彎道制動過程中既避免了車輪抱死,又減小了車身的橫擺角速度,增加了制動穩定性。
本文方法僅需獲得輪速信號,即可在現有的ABS基礎上通過改進算法就能得到理想的效果,具有一定的實用價值。



評論