汽車二自由度數據采集系統設計

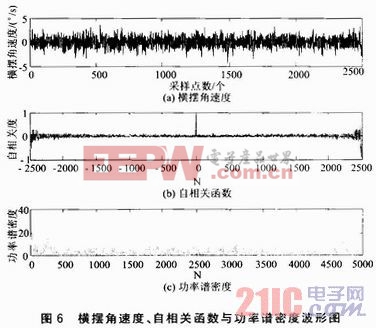
由圖可知,自相關函數只有在橫坐標為0時候才有取值,功率譜密度分布比較均勻,而且采集到的數據均值近似為0,這與高斯白噪聲的統汁特性相似,因而斷定干擾源類型為高斯白噪聲。
3.2 汽車正常運行模式
汽車正常運行模式是汽車勻速行駛在水平、下燥、水泥路面上,測得此時的汽車橫擺角速度與側向加速度。從傳感器采集到的數據不可避免地受到干擾源的影響,由上面給出的結論可知干擾源類型為白噪聲。卡爾曼濾波前的數據與濾波后的數據如圖7所示。卡爾曼濾波對白噪聲具有很好的濾波能力,它的濾波原理是最小均差原理,并且當前的數據只與前一個數據有關,數據存儲量小,有利于計算機求解,所以選用卡爾曼濾波方式對采集到的數據進行濾波,從而得到相對準確的數據。這里采集了10 000個數據點。
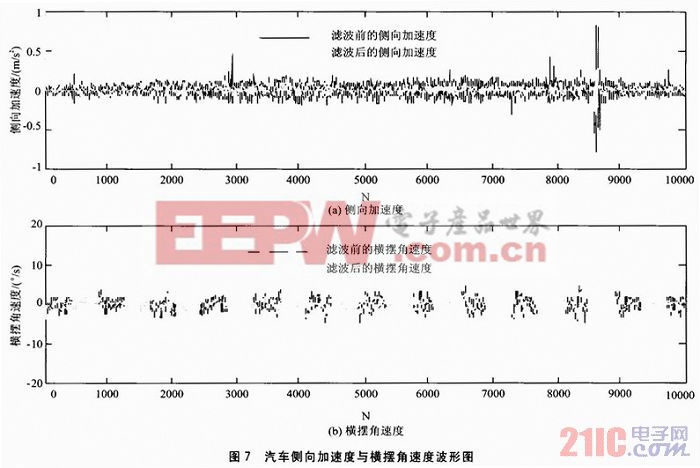
由圖7可以看到,通過卡爾曼濾波后,曲線更加平滑,有效地剔除了雜波,從而為控制系統提供更準確的數據。
結語
本文采用ARM微控制器和ADIS16355傳感器設計了一種數據采集系統,不但能夠采集汽車的橫擺角速度與側向加速度兩個參數,而且用卡爾曼濾波方式對采集到的數據濾掉了雜波,使得到的數據更為準確。經分析表明,該設計方案是可行的。這種數據采集系統在汽車主動安全方面有很好的應用價值,能為汽車穩定性分析供準確的數據。




評論