汽車二自由度數據采集系統設計

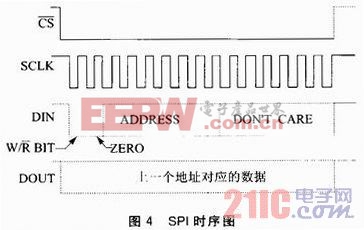
由于傳感器ADIS16355輸出的數據是16位的,所以傳送數據也是以16為周期。最高位代表讀寫控制位,如果為0代表向傳感器中寫入命令,為1則代表從傳感器中讀出當前狀態;次高位為0,緊接著的6位代表對應寄存器的地址,最后面8位不關心。注意,在這個地址下讀出來的數據是對應上一個地址的數據;與此同時從控制器把對應的采集到的16位數據發送到主機中去。
3 系統軟件設計與數據分析
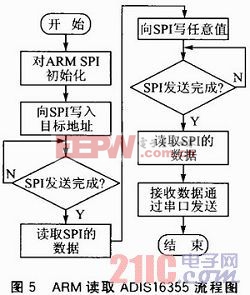
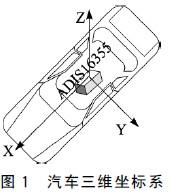
該系統針對汽車二自由度的數據采集,而汽車二自由度是指汽車橫擺角速度與側向加速度,所以利用ADIS16355傳感器采集這兩個數據。由ADIS16355的說明書可知,反映橫擺角速度的寄存器的地址為0x08或0x09,而側向加速度對應的寄存器地址為0x0A或0x0B,要想得到汽車橫擺角速度與側向加速度,按照時序讀出相應寄存器地址的數據即可。其工作流程如圖5所示。
然而汽車運行中不可避免會受到其他因素的干擾,采集到的數據可能存在一定程度上的失真性,因此需要找出干擾源的類型,從而選擇適當的方法把雜波濾掉,得到相對準確的數據。為此設計汽車怠速與正常運行兩種模式。汽車在怠速狀態下,由于汽車是相對靜止狀態,理論上測到的汽車橫擺角速度與側向加速度為0,然而由于存在其他的干擾因素,因而實際測得的數據并不為0。通過對測試數據的分析可以得到干擾源的類型,從而根據干擾類型而設計出相應的濾波方式。下面分別就汽車的怠速模式與正常運行模式兩種運動方式具體分析。
3.1 汽車怠速模式
汽車怠速模式是指發動機處于啟動狀態,但是汽車處于停止不前的狀態,可以測得相應的數據。這里以汽車的橫擺角速度數據進行分析,取了2500個采樣點,利用數據的統計特性對數據分別求均值、協方差與功率譜密度,求得的均值為-7.7682e-005,近似為0。為了直觀,把采集到的源數據、協方差與功率譜密度通過MATLAB作圖的方式顯示出來,如圖6所示。




評論