基于視覺處理的ADAS系統實現

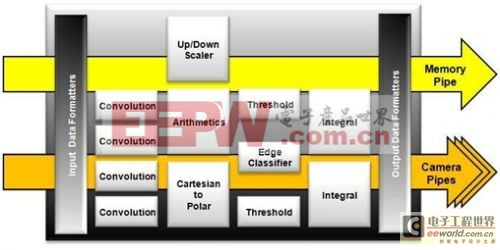
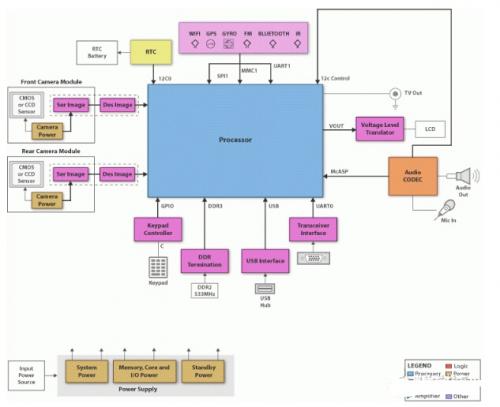
圖1:采用ADSP-BF60x處理器的視覺處理。
Blackfin內核上運行的軟件從這里開始可進一步處理結果。PVP攝像頭數據流水線提供的結果使得軟件能夠有效地識別感興趣區域(ROI)。現在,只有ROI需要從外部存儲器回讀以便進一步分析。讀取可以由DMA、內核或PVP存儲器數據流水線完成。后者通過將ROI數據過濾或調整至理想模板大小,可進一步分析或傳輸。直方圖結果依然可以輕松獲得。如果存儲器數據流水線的高密度輸出存儲在片內存儲器上,Blackfin內核現在就可以通過本地方式對ROI進行分類,并根據需要對比原始數據對其進行驗證,或者對比存儲在DDR2存儲器中的先前幀的相應區域進行驗證。
流水線視覺處理單元(PVP)近觀
PVP可以處理多達四個數據流、三個攝像頭數據流水線和一個存儲器數據流水線,此外還可以計算直方圖狀態輸出。如圖2所示,PVP工具箱包括12個處理塊,均針對各種視覺處理步驟進行了優化。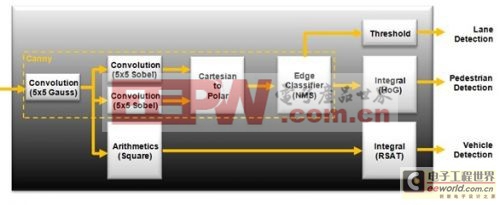
圖2:流水線視覺處理單元(PVP)。
通常而言,存儲器數據流水線根據需求采用一個或多個處理塊來分析一系列ROI,而且可能即時改變算子。攝像頭數據流水線傾向于以并行方式處理全幀,輸入數據可以多點傳輸至多個處理分支。用戶可以十分靈活地互連算子而形成數據流水線。圖3所示是一種可能的配置。
圖中可以看到傳統的Canny結構。這種結構包括一個具有高斯系數的低通濾波器、5×5矩陣的增強Sobel濾波器、笛卡爾坐標至極坐標的轉換和一個非極大值抑制(NMS)級。剩下的最大值可能會通過一個閾值塊傳輸來降低位分辨率,或對輸出進行游程長度壓縮,以實現最低的存儲器加載。如果由軟件(例如用霍夫變換算法)進行后處理,線路檢測和車道保持輔助策略就可以通過這一邊緣圖像獲得。
如果梯度轉送至積分塊(梯度直方圖,HoG),行人檢測所需的處理過程就已經完成了一半。低通像素的平方可能饋送到其他的積分塊,積分塊隨后可以在正常模式(SAT)或對角線模式(RSAT)下運行。如果不需要高分辨率(例如在陰影檢測的情況中),它可以降低輸出的幀分辨率。
圖中所示的示例配置顯示了如何在單芯片中有效實施車道保持輔助以及行人和車輛檢測,同時將Blackfin內核的MIPS負載保持在適當水平。未使用的MIPS和尚未使用的存儲器數據流水線功能可以用來將前燈控制和/或交通標志檢測集成在上方。所有這些功能都可以通過ADSP-BF60x器件實現,該器件在105℃環境溫度下功耗不足1.3W,因此可以輕易安裝在車內中央后視鏡后方,靠近圖像傳感器。此外,ADI公司的ADAS視覺處理器還支持日間和夜間視覺系統,能夠分析車輛周圍的環境;并配備有駕駛員監控系統,可以檢測駕駛員狀態。
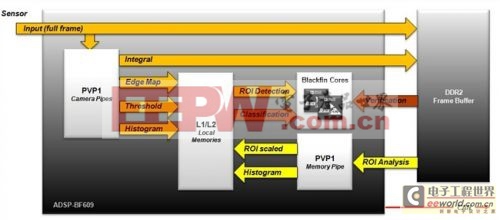
圖3:物體和行人檢測配置示例。
經濟實惠的駕駛員輔助系統
ADI公司將視覺及雷達系統的ADAS列為開發重點。利用Blackfin BF609和BF608形式的全新專用ADAS視覺系統解決方案,ADAS視覺技術目前非常經濟實惠,可以在各種級別的車輛中大規模采用。








評論