基于模型自抗擾控制器在無主軸凹版印刷機控制中的應用分析

現在國內印刷機較多使用PID控制器,為了能獲得更好的印刷效果,多以調節PID的參數為研究方向。自抗擾控制器繼承了經典PID控制器不依賴對象模型的特性,同時又克服了經典PID的不足,如快速性與超調之間的矛盾,參考輸入信號不可微,甚至不連續等。本文首次將自抗擾控制器應用到印刷機糾偏控制中,通過對印刷機物理結構的考察以及印刷工藝的理解,得到印刷機的糾偏模型。基于模型的自抗擾控制器同普通的PID控制器,以及普通的自抗擾控制器,進行了仿真對比,結果表明基于模型的自抗擾控制器具有明顯的優點,即使模型的參數跟實際的對象參數有一定的差值【1】【2】【4】。
2無主軸凹版印刷機模型
有主軸凹印機以一根主軸整驅動各個色組,以保證同步。出現偏差后,通過調節擺輥位置來糾正偏差。但該結構易使主軸與各色組連接的軸承磨損導致印刷精度的下降,而且維護難度較大,印刷精度不高。隨著對印刷品質量要求的提高,無主軸凹印機成為發展方向。該機型每一個色組都有自己的驅動,多用伺服電機或變頻器驅動,通過調整驅動速度或位移來糾正偏差。其印刷精度高,但是控制起來更加復雜。鑒于凹印機發展方向,本文推導無主軸凹版印刷機的模型【3】【7】。下圖是無主軸凹版印刷機的整個機組示意圖:

其中MR是膠輥或稱壓輥,ML是各色組之間的導輥,MS是版輥,上面刻有印刷的圖案。將其中一色組進行放大,分析其中的關系。
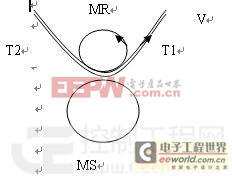
圖2中的MR,MS如上所述,分別是膠輥與版輥,T2是這個色組同上一色組之間材料的張力,T1是同下一個色組之間的張力。V是材料的速度。MR的線速度為SPD1,MS的線速度為SPD2
對MR進行受力分析,Ts1-Tz1=J1
 公式(1)其中Ts1為膠輥的動力矩,也就是薄膜給膠輥提供的摩擦力,Tz1為膠輥受到的機械摩擦力,r1為膠輥的半徑,膠輥的轉動慣量J1一般小于版輥的慣量J2,其中J等于
公式(1)其中Ts1為膠輥的動力矩,也就是薄膜給膠輥提供的摩擦力,Tz1為膠輥受到的機械摩擦力,r1為膠輥的半徑,膠輥的轉動慣量J1一般小于版輥的慣量J2,其中J等于 。Ts1的最大值就是膠輥與材料發生相對滑動時的摩擦力Tms1。對于版輥MS,有Tm-Ts2-Tz2=J2
。Ts1的最大值就是膠輥與材料發生相對滑動時的摩擦力Tms1。對于版輥MS,有Tm-Ts2-Tz2=J2 公式(2) Tm為電機提供的轉動力矩,其它與膠輥的定義方式相同。版輥與薄膜發生相對滑動時,Ts2的最大值Tms2小于Tms1(一般膠輥的表面比版輥表面粗燥,所以版輥與薄膜發生相對滑動的力小于薄膜與膠輥發生相對滑動的力),所以只要在運行時膜的張力不大于Tms2就可以正常印刷,不發生滑動。現在只要運行時薄膜張力小于Tms2,就可以保證正常印刷,這個Tms2也就是在糾偏時所允許的張力最大值,正常印刷時材料所需張力是小于此值的。
公式(2) Tm為電機提供的轉動力矩,其它與膠輥的定義方式相同。版輥與薄膜發生相對滑動時,Ts2的最大值Tms2小于Tms1(一般膠輥的表面比版輥表面粗燥,所以版輥與薄膜發生相對滑動的力小于薄膜與膠輥發生相對滑動的力),所以只要在運行時膜的張力不大于Tms2就可以正常印刷,不發生滑動。現在只要運行時薄膜張力小于Tms2,就可以保證正常印刷,這個Tms2也就是在糾偏時所允許的張力最大值,正常印刷時材料所需張力是小于此值的。如圖1,假定相鄰兩個色組1和2,色組1的速度是V1,色組2的速度是V2。根據廣義胡克定律,在材料彈性形變內,應變與張力成正比,這樣可得出兩輥間由于速度產生的張力。假定V1與 V2是相同速度的,那么在相同時間t內經過兩輥的薄膜長度是相同的www.cechina.cn,若V2>V1,在時間t內,兩輥所經過的距離分別是V1*t與V2*t,當經過時間
 時,G1經過的材料長度是為
時,G1經過的材料長度是為 ,那么在此時間內G2經過的距離是 = *V2 ,那么則有
,那么在此時間內G2經過的距離是 = *V2 ,那么則有 ,令
,令 =K*(V2-V1),E為材料的彈性模量, 是材料在設定張力下兩版輥間的長度,
=K*(V2-V1),E為材料的彈性模量, 是材料在設定張力下兩版輥間的長度,  是材料在張力變化后的長度。這就是糾偏的最基本公式。在運行時只要保證K*(V2-V1)小于Tms2就可以正常印刷不拉斷料。根據這個公式以及所采用的控制方法,比如使用速度還是位移作為控制量,以負偏差為輸出,最終可以推導出印刷機的負偏差與控制量的微分方程模型,這樣輸出的負偏差就可以糾正出現的偏差了。
是材料在張力變化后的長度。這就是糾偏的最基本公式。在運行時只要保證K*(V2-V1)小于Tms2就可以正常印刷不拉斷料。根據這個公式以及所采用的控制方法,比如使用速度還是位移作為控制量,以負偏差為輸出,最終可以推導出印刷機的負偏差與控制量的微分方程模型,這樣輸出的負偏差就可以糾正出現的偏差了。3基于模型的自抗擾控制器
自抗擾控制器(ADRC-Auto Disturbance Rejection Controller)由跟蹤微分器TD,階擴張狀態觀測器ESO,非線性組合NLSEF組成,TD用于跟蹤給定V并且給出一個平滑的輸入V1,同時給出其微分信號。NLSEF的原理就是大誤差小增益,小誤差大增益的非線性比例環節,ESO用于給出輸出的跟蹤信號CONTROL ENGINEERING China版權所有,及其微分信號,它的另一個主要功能就是能估計出擾動項,以消除靜差【5】【8】。假設 是已得到的模型,那么基于模型的ADRC具體形式是:
(1)TD方程

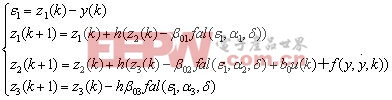
(2)ESO方程
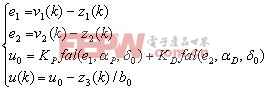
(3)NLSEF方程
對于上面的各方程,調整好參數后系統既能有快速性,又有穩定性,具體參數調試方法以及各參數的定義,可以參閱其他有關自抗擾控制器的論文。

評論